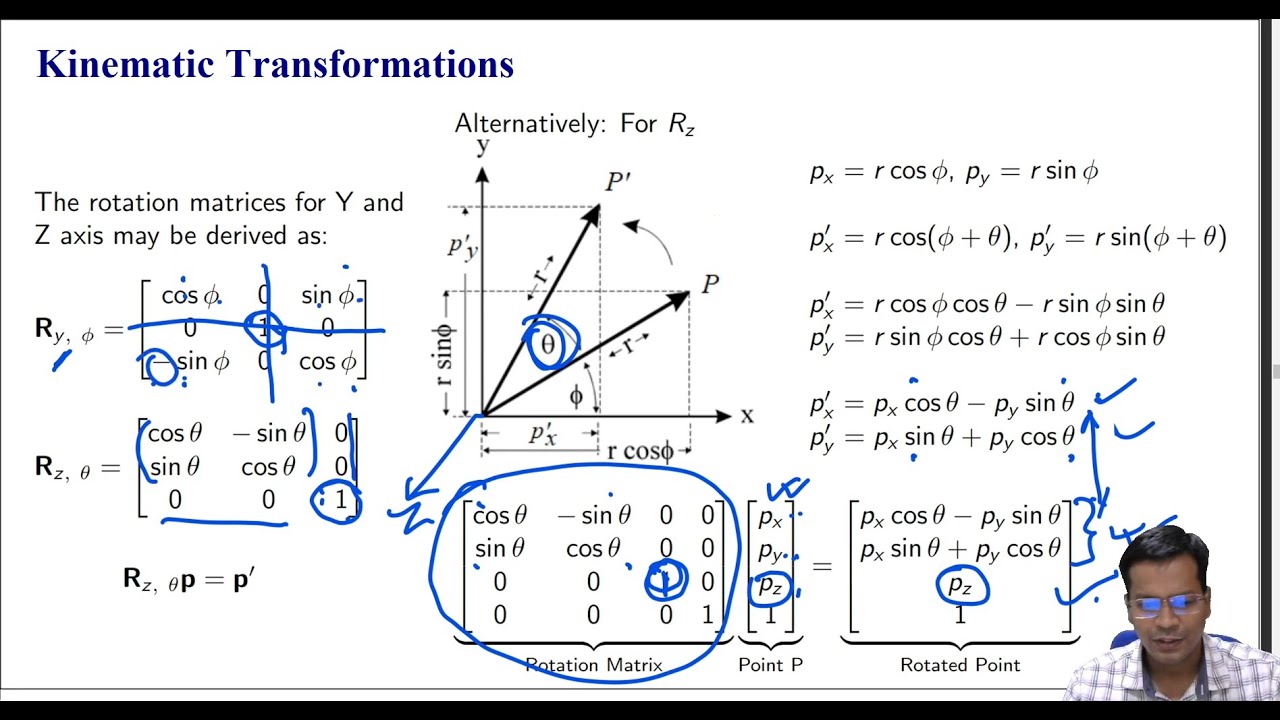
Kinematic Transformations: Translation and Rotations
Автор: Arun Dayal Udai
Загружено: 2021-10-08
Просмотров: 9900
Описание:
This is the part of the course run by TexMin, IIT (ISM) Dhanbad
Introduction to the Course entitled "Industrial Robotics and Automation".
1. Introduction and Revision 00:00
2. Pose of a Rigid Body: Matrix Representations 01:35
3. A point in space 02:09
4. A Frame 04:26
5. A Frame in a Fixed Reference Frame 08:01
6. A Rigid Body 10:16
7. Homogeneous Transformation Matrix 11:50
8. Advantages of Homogeneous Transformation Matrix 14:38
9. Translation Matrix Operator 20:08
10. Pure Rotation 23:55
11. Basic Rotation Matrices 25:35
12. Composite Rotation Matrix 45:27
13. Changing the Order of Transformations 50:02
Please post your comments if you have any doubt.
Повторяем попытку...
Доступные форматы для скачивания:
Скачать видео
-
Информация по загрузке:



![Introduction to Robotics [Course 2017]](https://imager.clipsaver.ru/PLR1KtmaCt9BkKra5-2jrTwjvLgLCKm-Wc/max.jpg)