Скачать
Forward Kinematics: Example of 2 and 3 DoF Robot Manipulators
Автор: Arun Dayal Udai
Загружено: 2021-10-13
Просмотров: 16579
Описание:
This is the part of the course run by TexMin, IIT (ISM) Dhanbad
Introduction to the Course entitled "Industrial Robotics and Automation".
1. Recapitulation of DH Frames and Link Transformation 00:00
2. Steps to assign DH Frames 09:38
3. Example 1 - Two Link Planar Manipulator 10:06
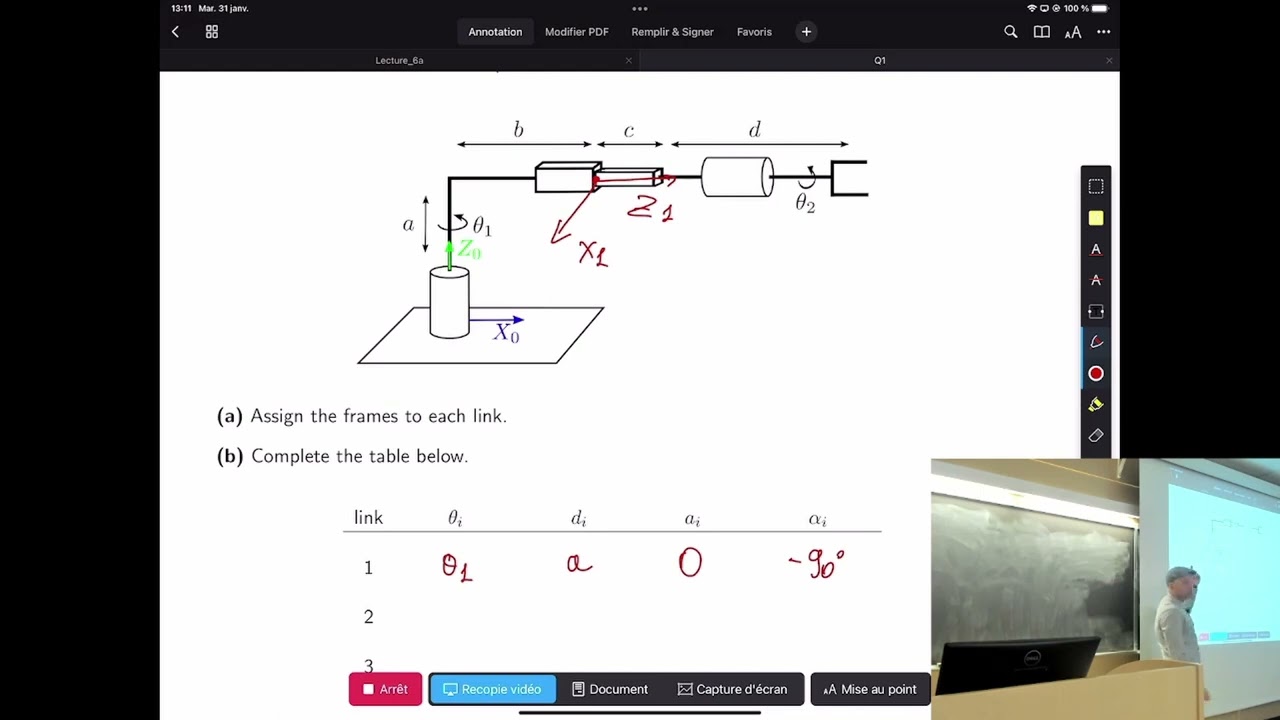
4. Example 2 - Three Link Cylindrical Manipulator 35:48
Post your queries in the comments section.
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...

Доступные форматы для скачивания:
Скачать видео
-
Информация по загрузке: