Скачать
Dynamics of an Industrial Serial Robot using Lagrange-Euler Approach
Автор: Arun Dayal Udai
Загружено: 2021-10-31
Просмотров: 7144
Описание:
This is the part of the course run by TexMin, IIT (ISM) Dhanbad
Introduction to the Course entitled "Industrial Robotics and Automation".
1. Introduction 00:00
2. Dynamics of a Two Link Manipulator 02:41
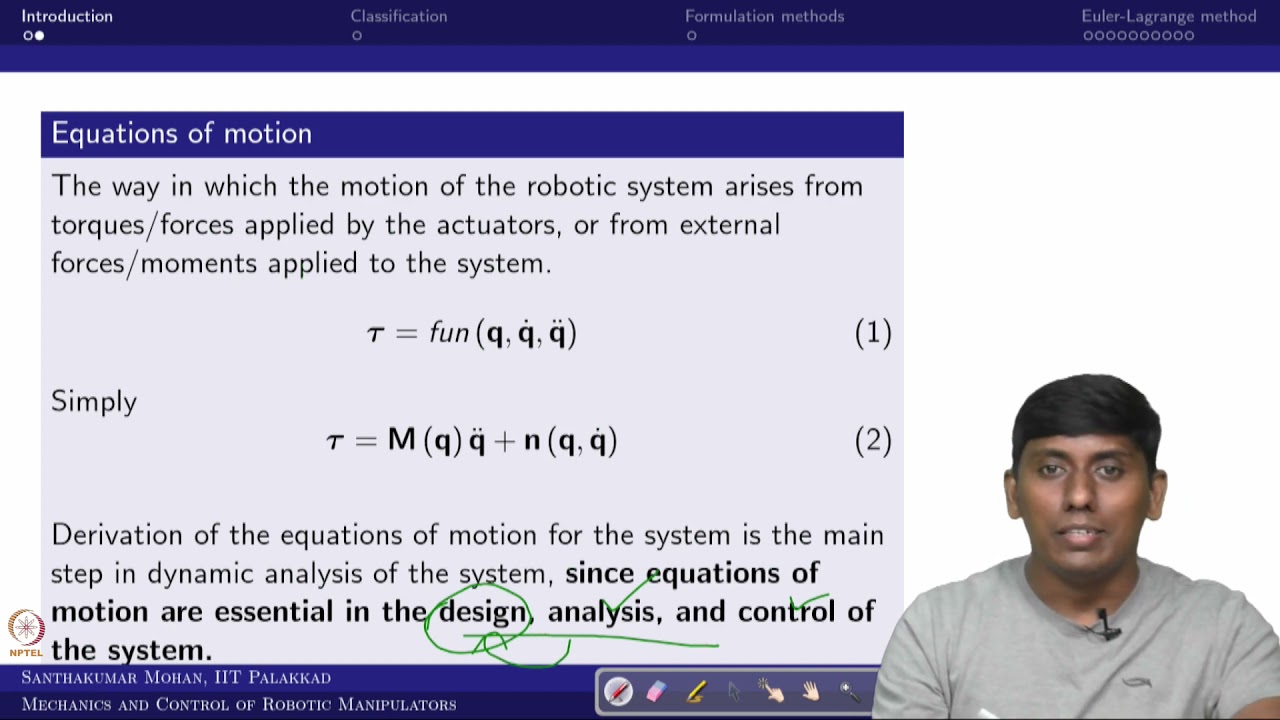
3. Interpretation of Dynamic Equation of Motion (EoM) 25:57
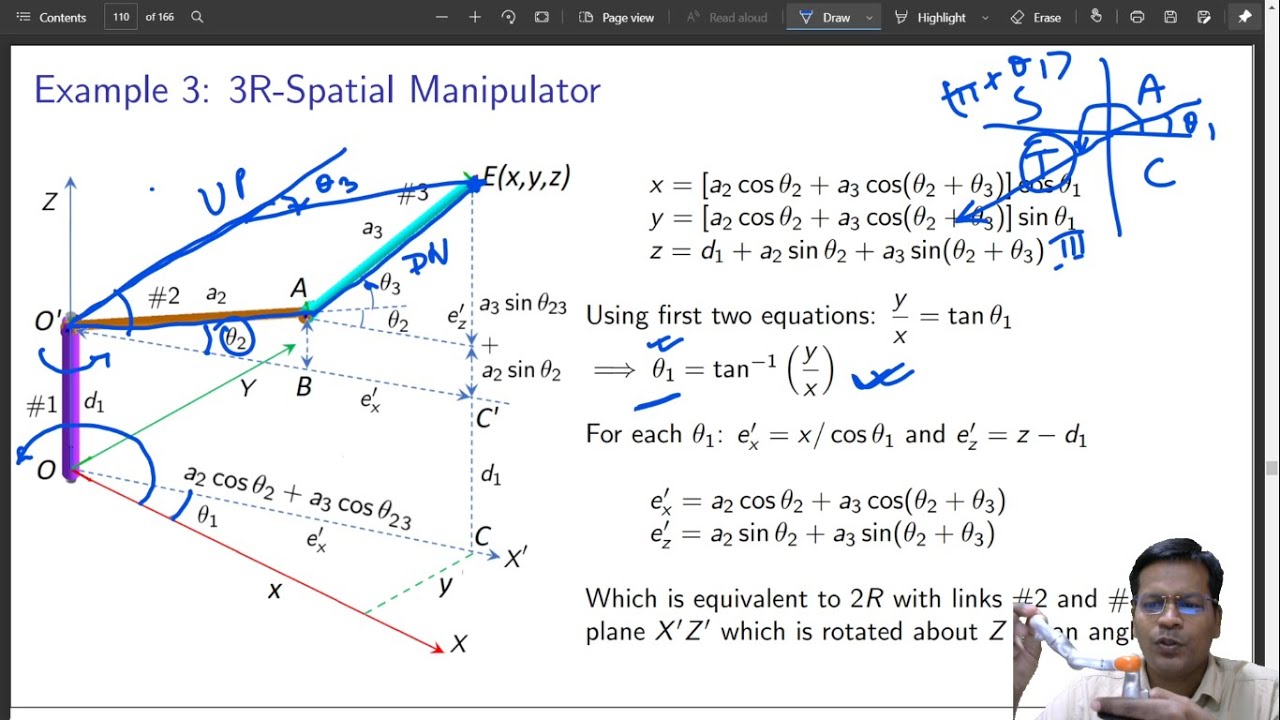
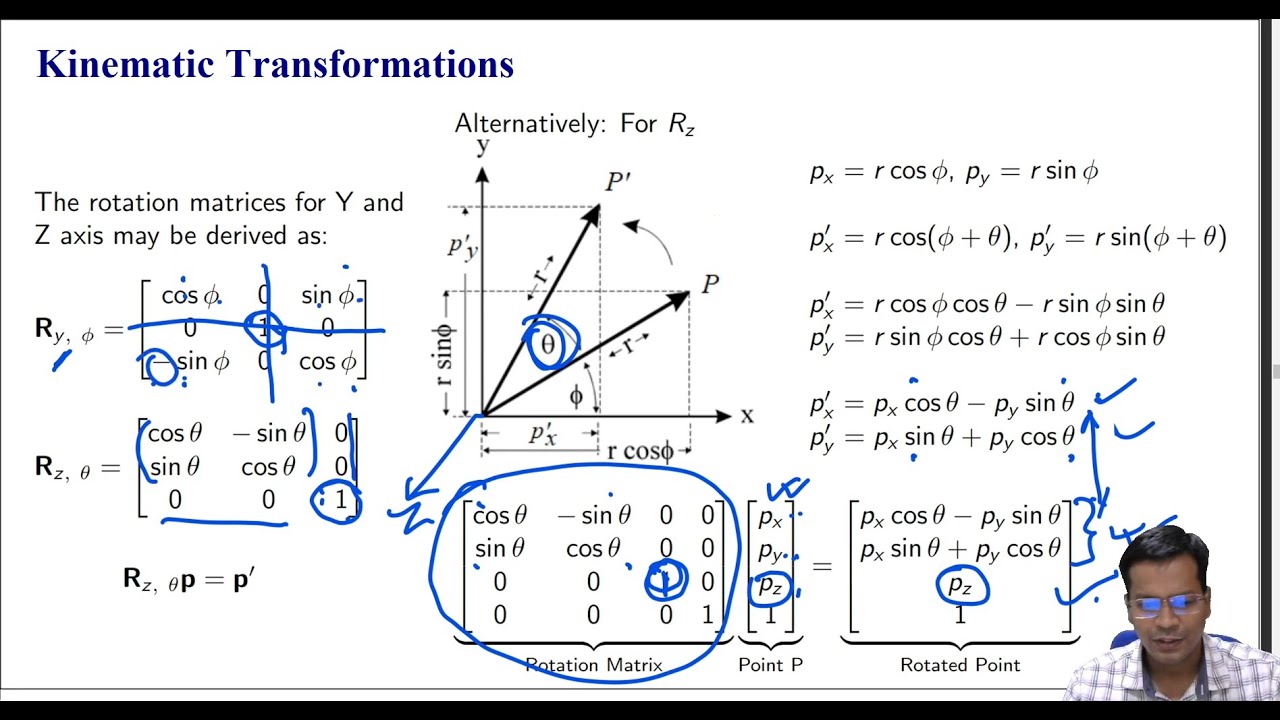
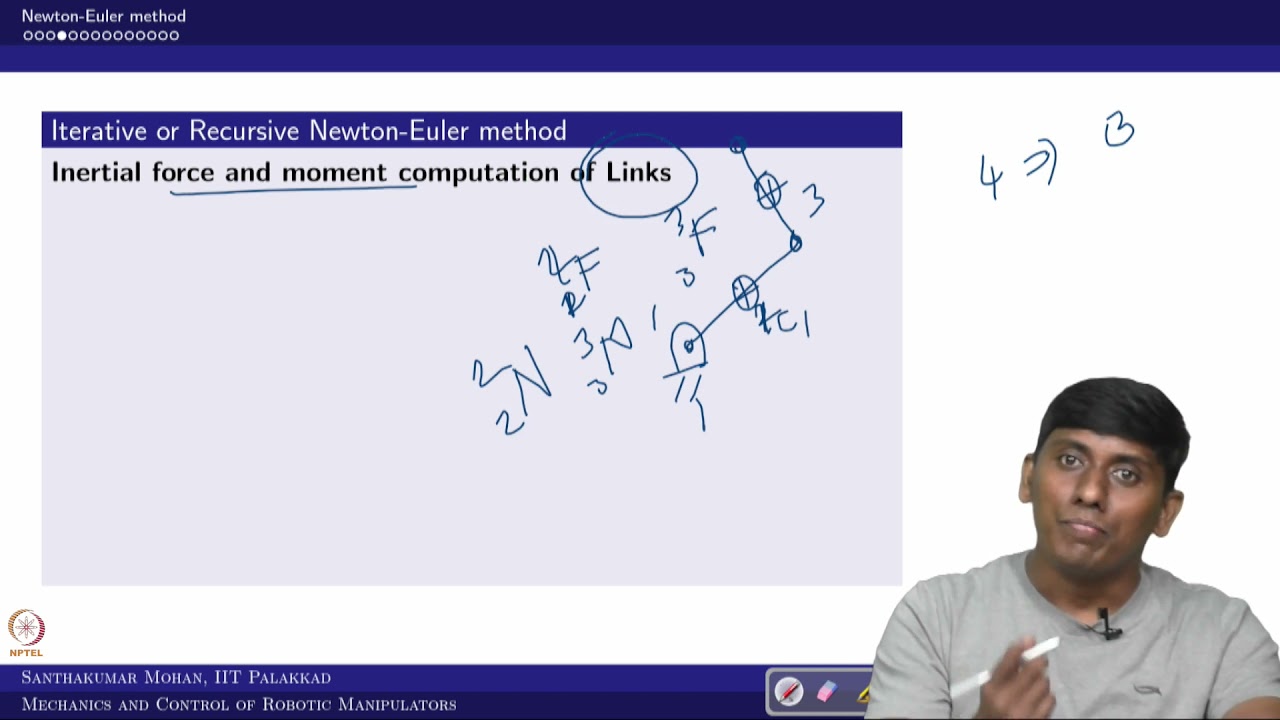
4. Vector-Matrix approach to obtain dynamic EoM for a spatial manipulator using LE approach 30:44
Please post your queries in the comments section below.
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...

Доступные форматы для скачивания:
Скачать видео
-
Информация по загрузке: