Rotational Low Impedance Physical Human-Robot Interaction using Underactuated Redundancy
Автор: Laboratoire de robotique de l'université Laval / Laval University Robotics Laboratory
Загружено: 2020-09-03
Просмотров: 1332
Описание:
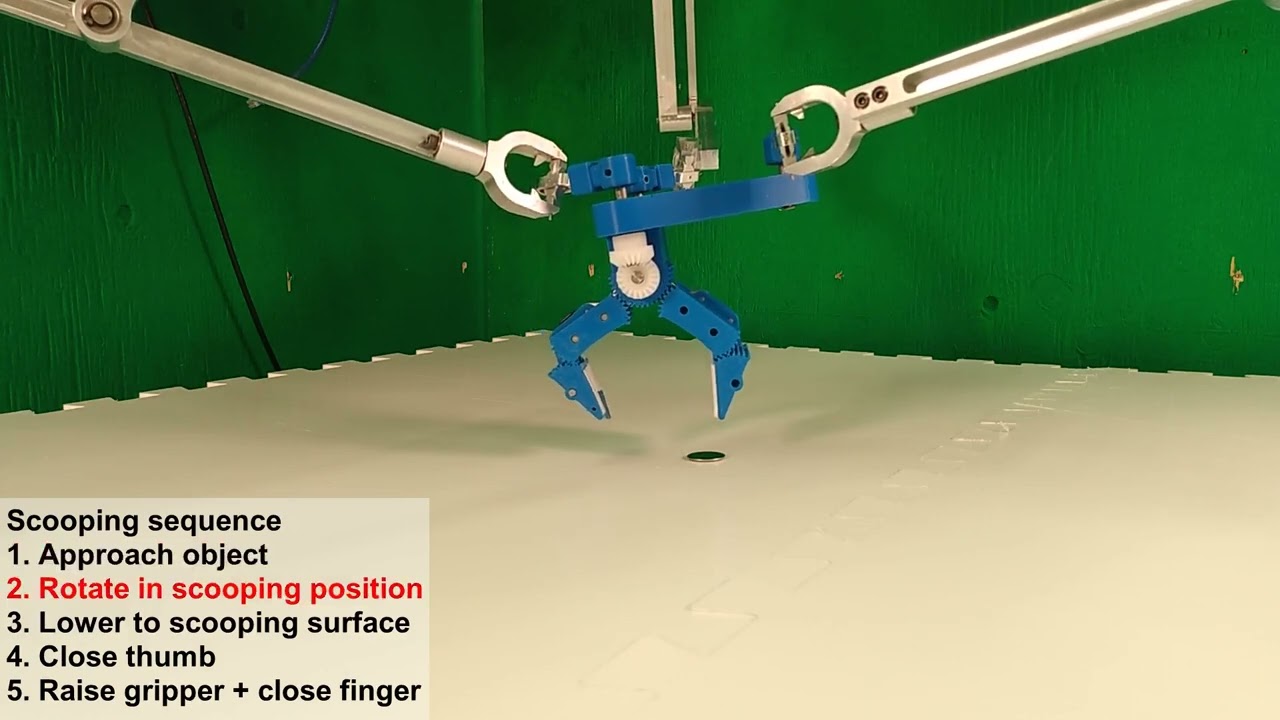
This video demonstrates the concept of underactuated redundancy for physical human-robot interaction (pHRI) in a context of industrial assembly by introducing a novel 1-dof gravity balanced rotational manipulator. Initially, the operator manipulates the payload without the locking mechanism. Then, it is included in order to demonstrate that the manipulation is much more intuitive. Finally, the rotational manipulator is calibrated for a larger payload.
Paper information: Audet, J., and Gosselin, C. (August 31, 2020). "Rotational Low Impedance Physical Human-Robot Interaction using Underactuated Redundancy." ASME. J. Mechanisms Robotics. doi: https://doi.org/10.1115/1.4048258 Paper link: https://asmedigitalcollection.asme.or...
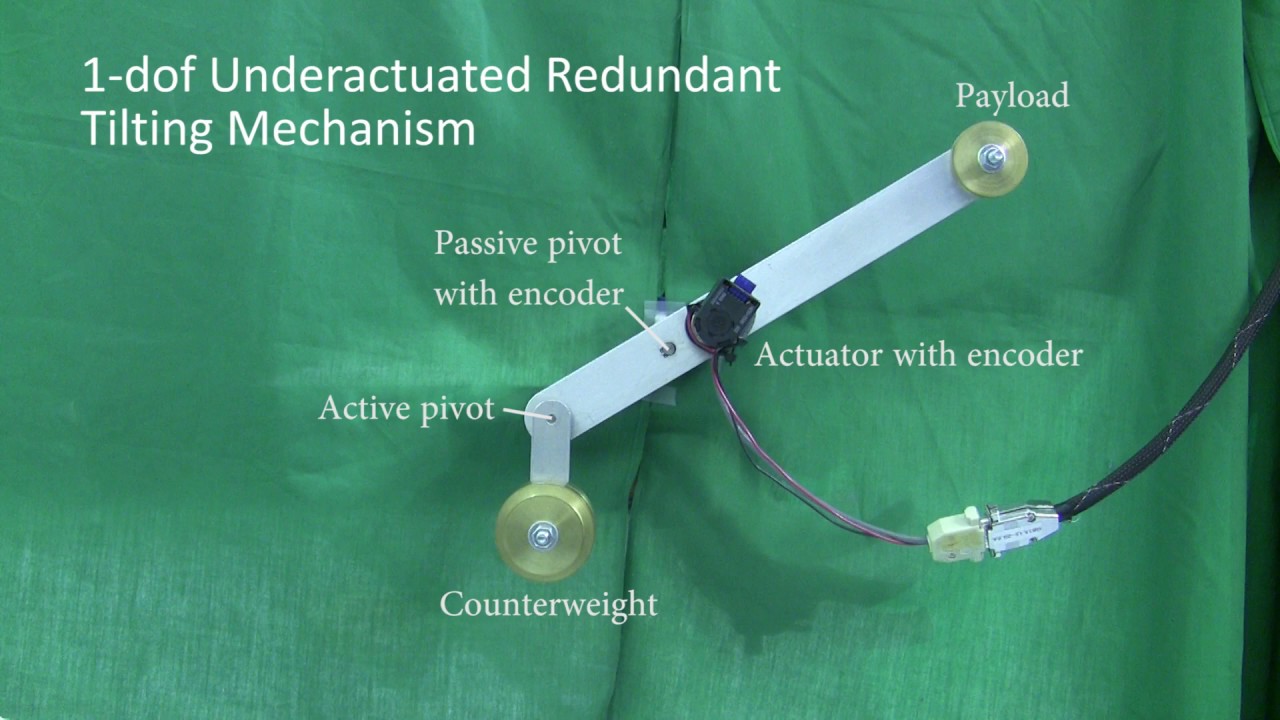
Abstract - This paper extends the concept of underactuated redundancy for physical human-robot interaction (pHRI) in a context of industrial assembly by introducing a novel 1-dof gravity balanced rotational manipulator. The proposed architecture consists of a rotational active counterweight with a passive joint equipped with an encoder. The proposed architecture is first described and the static equilibrium conditions are used to describe the operation of the mechanism. Then, alternative architectures are briefly introduced. Finally, an experimental validation is provided to demonstrate the viability of the concept for rotational low-impedance pHRI. Website: https://robot.gmc.ulaval.ca/en/home/
Повторяем попытку...
Доступные форматы для скачивания:
Скачать видео
-
Информация по загрузке:







![Эффект Джанибекова [Veritasium]](https://imager.clipsaver.ru/N9HlQ-XVnFk/max.jpg)