Grasping and Scooping using the Redundant Degrees of Freedom of a Parallel Robot
Автор: Laboratoire de robotique de l'université Laval / Laval University Robotics Laboratory
Загружено: 2024-01-10
Просмотров: 1718
Описание:
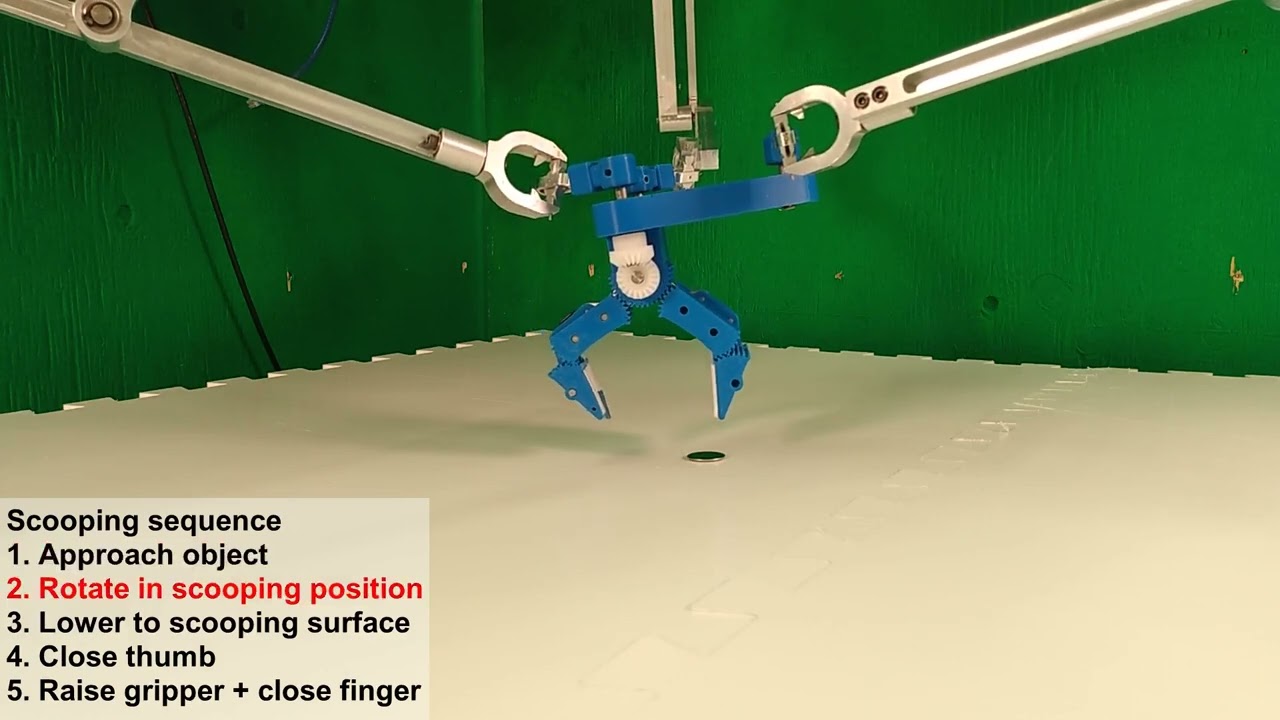
Kinematic Design and Prototyping of a Gripper With Grasping and Scooping Capabilities Driven by the Redundant Degrees of Freedom of a Parallel Robot
This video demonstrates a gripper that can provide grasping and scooping capabilities to a parallel robot. This enables the parallel robot to manipulate not only large objects, but also thin objects lying on flat surfaces. Moreover, this gripper is driven directly by the redundant degrees of freedom of the backdrivable parallel robot to which it is integrated. Thus, by eliminating actuators from the gripper, weight is drastically reduced, thereby making it possible to take advantage of the full payload of the parallel robot. Also, the backdrivable characteristic of the robot makes it possible to perform contact tasks without requiring a force/torque sensor.
Cette vidéo montre un préhenseur capable d’effectuer des saisies et des ramassages. Le préhenseur est intégré à un robot parallèle redondant ce qui permet la manipulation d’objets de tailles diverses, incluant des objets minces reposant sur une surface plane. Le préhenseur est entraîné par les moteurs du robot parallèle ce qui permet d’éliminer les actionneurs du préhenseur et de réduire la masse de l’effecteur et ainsi de profiter de la charge utile complète du robot. De plus, le robot étant rétroentraînable, il est possible d’effectuer des tâches en contact sans utiliser de capteur d’effort.
Article:
Beaulieu, C.-A., Nguyen, T.-S., Laliberté, T. and Gosselin, C., 2024, Kinematic Design and Prototyping of a Gripper With Grasping and Scooping Capabilities Driven by the Redundant Degrees of Freedom of a Parallel Robot, ASME Journal of Mechanisms and Robotics, Vol. 16, No. 8, 081001. https://doi.org/10.1115/1.4063668
Повторяем попытку...
Доступные форматы для скачивания:
Скачать видео
-
Информация по загрузке:



















