Low-Impedance Sensorless Physical Human-Robot Interaction with a Parallel Robot
Автор: Laboratoire de robotique de l'université Laval / Laval University Robotics Laboratory
Загружено: 2026-02-27
Просмотров: 2035
Описание:
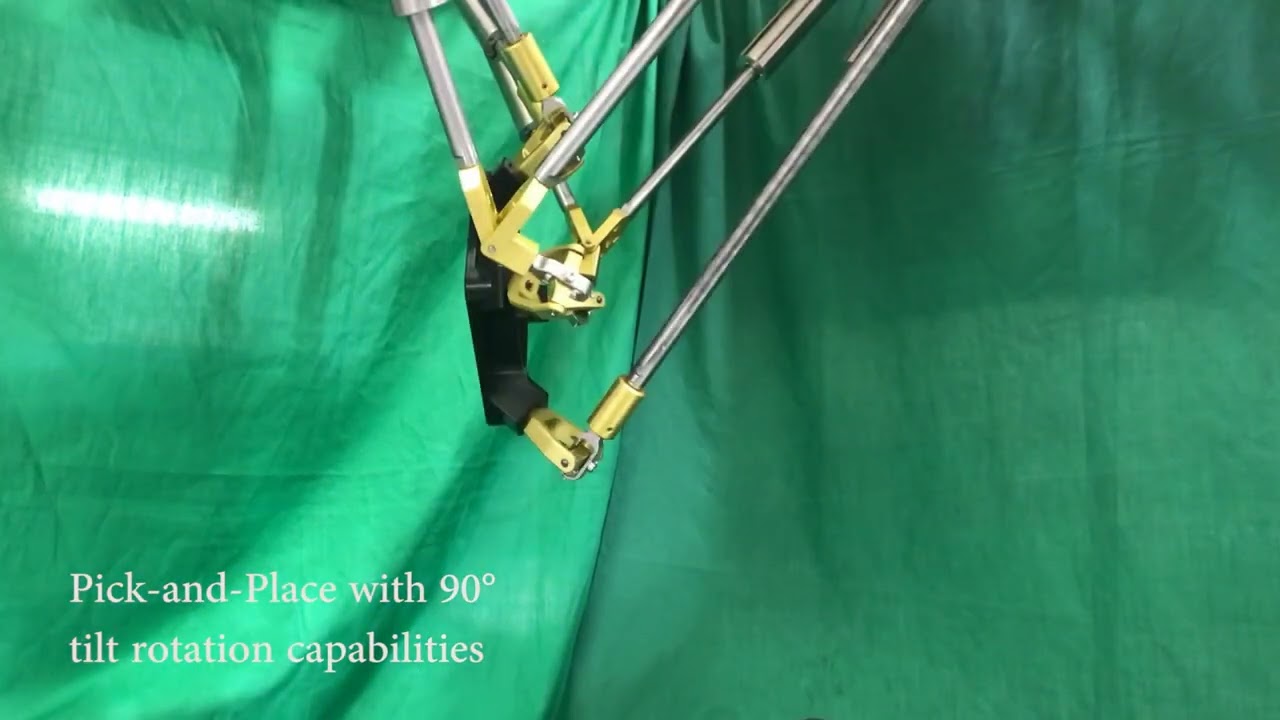
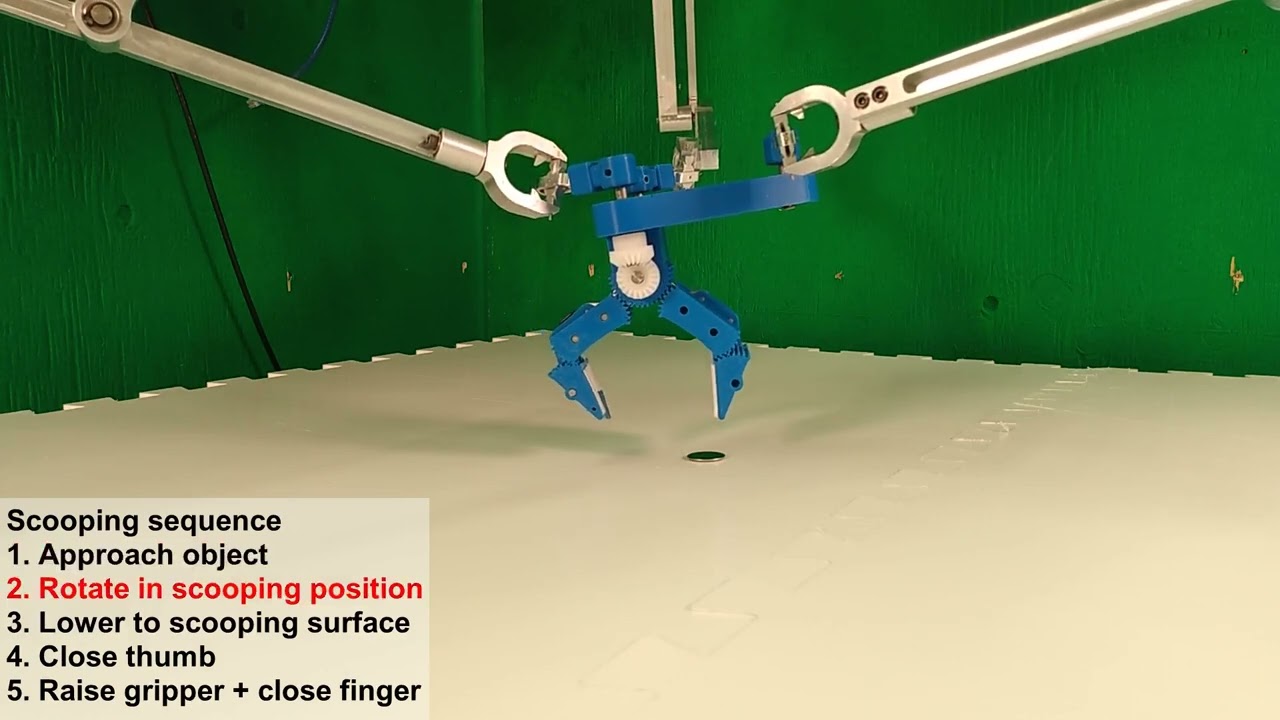
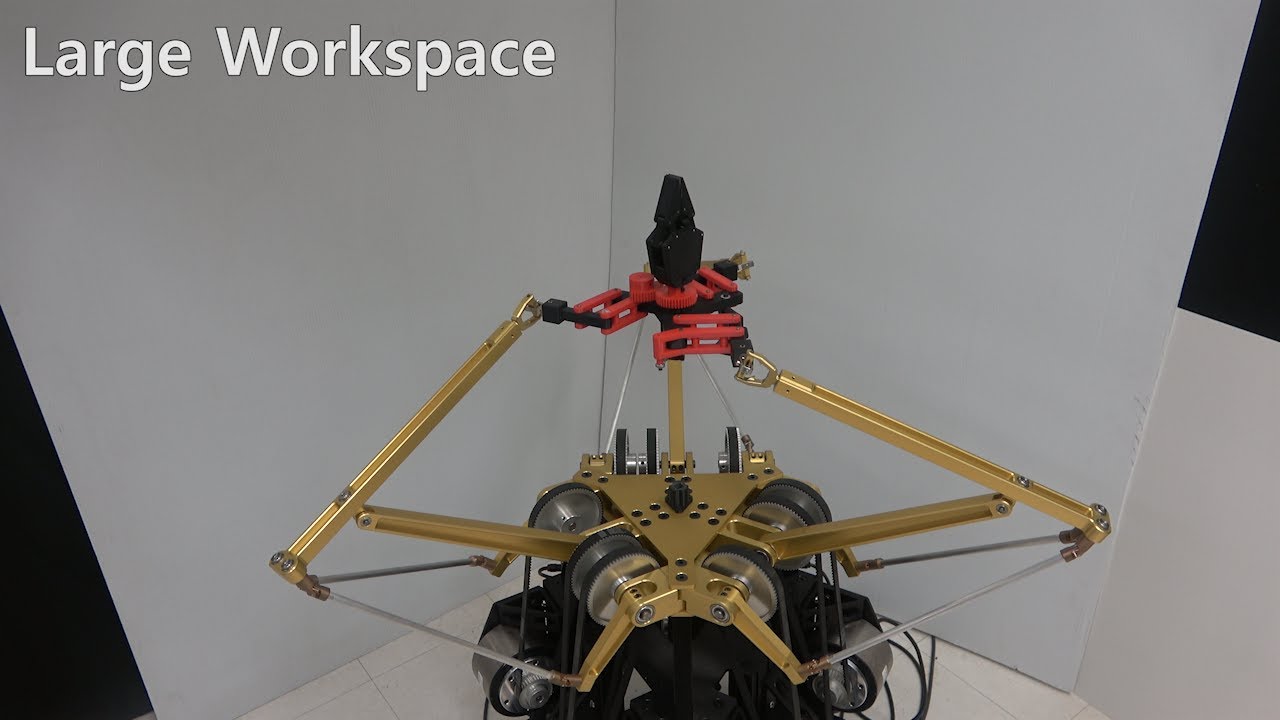
This video presents a kinematically redundant 9-DoF parallel robot designed for low-impedance, sensorless physical human-robot interaction. All actuators are located on the base of the robot, resulting in low moving mass and reduced inertia at the end-effector.
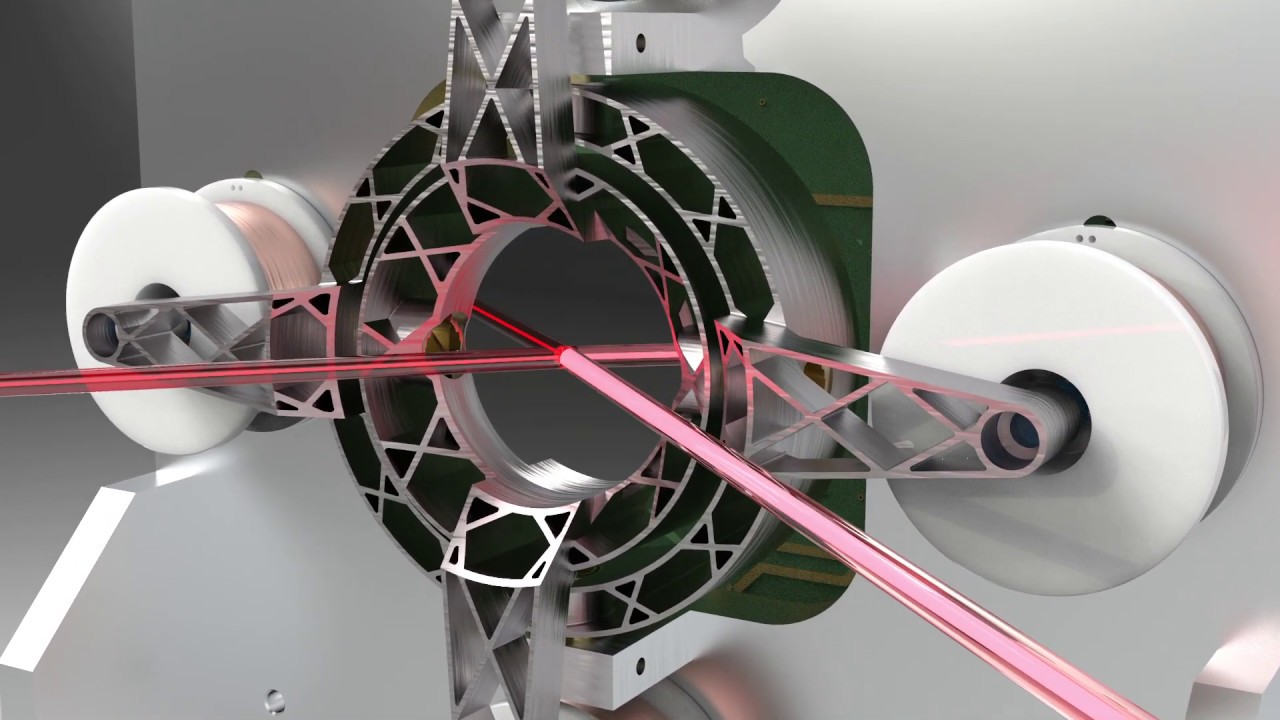
The robot relies on backdrivable direct-drive motors for proprioceptive actuation, enabling intuitive, low-impedance, and high-bandwidth physical interaction without the need for force or torque sensors. This architecture is well suited for safe and responsive human-robot interaction tasks.
Arda Yigit, Simon Foucault, Thierry Laliberté, David Breton, Zhou Zhou, Clément Gosselin
Control Engineering Practice, Volume 169, April 2026
https://doi.org/10.1016/j.conengprac....
#HumanRobotCollaboration #ParallelRobots #RoboticsResearch
Повторяем попытку...
Доступные форматы для скачивания:
Скачать видео
-
Информация по загрузке: