4-DOF Parallel Mechanism with Large Translational and Orientational Workspace
Автор: Laboratoire de robotique de l'université Laval / Laval University Robotics Laboratory
Загружено: 2025-11-07
Просмотров: 865
Описание:
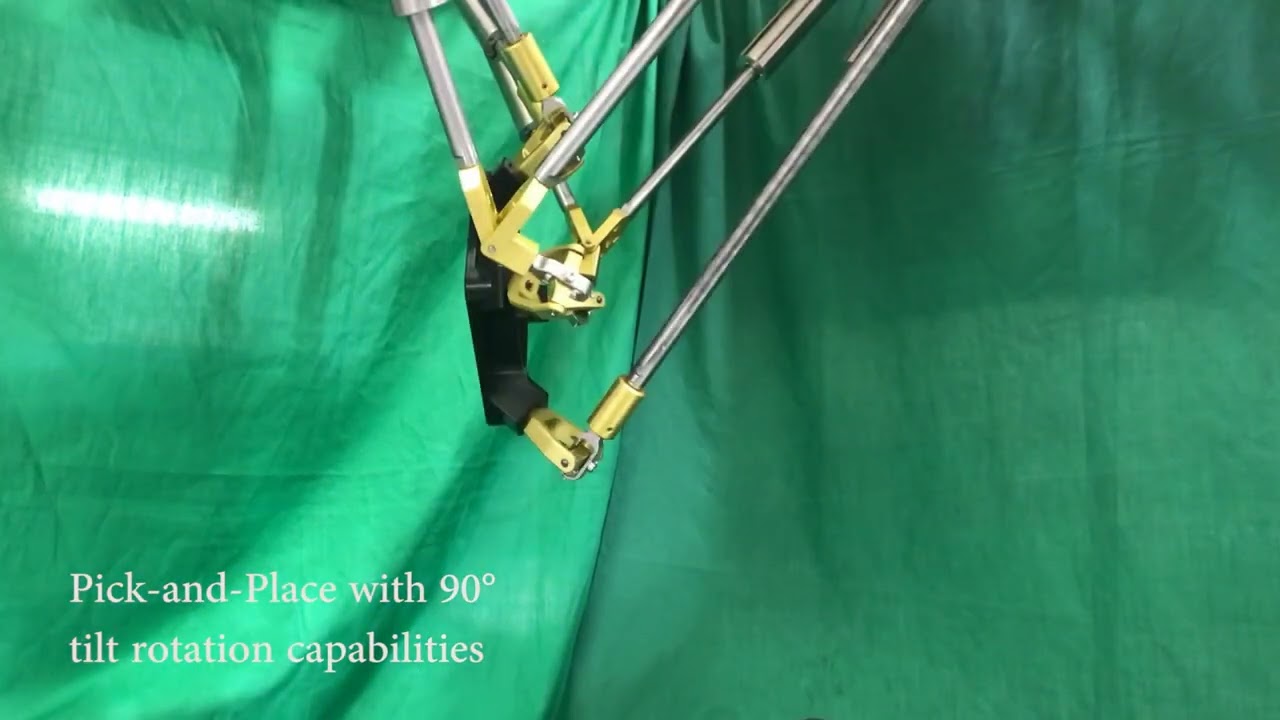
This video demonstrates the capabilities of a four-degree-of-freedom parallel mechanism (three translations and one rotation).
The mechanism comprises two sets of parallelogram linkages, which constrain two of the rotational degrees of freedom of the mechanism.
Since the mechanism is driven by four parallel sliders, one of the translations can be very large.
The first trajectories illustrate each of the Cartesian degrees of freedom.
Then, the large workspace is illustrated using a general trajectory and a pick and place trajectory.
Finally, the assembly modes and a singular configuration of the mechanism are presented.
Details are provided in the following article: https://doi.org/10.1109/ICRA.2019.879...
Повторяем попытку...

Доступные форматы для скачивания:
Скачать видео
-
Информация по загрузке: