Inverse Kinematics of SCARA and 6-DoF Industrial Robots
Автор: Arun Dayal Udai
Загружено: 2021-10-21
Просмотров: 13128
Описание:
This is the part of the course run by TexMin, IIT (ISM) Dhanbad
Introduction to the Course entitled "Industrial Robotics and Automation".
1. Inverse Kinematics of 3 DoF RPP Cylindrical Robot 00:00
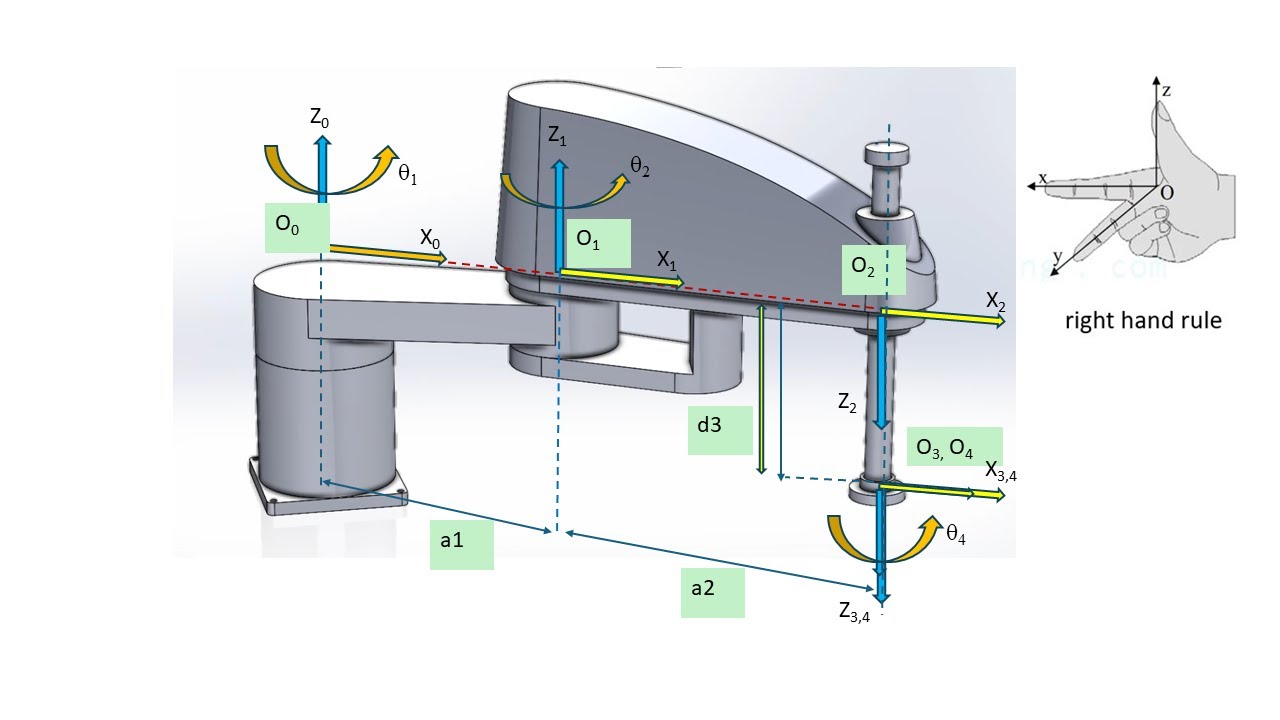
2. Inverse Kinematics of 4 DoF SCARA Robot 06:35
3. Inverse Kinematics of 6-DoF Wrist Partitioned Industrial Robot 17:45
4. Demonstration of 8 Solutions of a 6-DoF Industrial Robot using RoboAnalyzer 51:09
Errata: At 35:05 The elements [1,2] and [2,2] of 3x3 Rotation Sub-Matrix of 3T6, should be S4C6 and C4C6, and not S1C3 and C1C3, respectively. - Acknowledgement to Adithya Reddy Nagireddy, Master's Student at Texas University.
Download RoboAnalyzer from http://www.roboanalyzer.com/
Please post your queries in the comments section below.
Повторяем попытку...

Доступные форматы для скачивания:
Скачать видео
-
Информация по загрузке: