Скачать
Robotics Lec17d: Feedback Linearization Trajectory Tracking Control (Fall 2024)
Автор: Pranav Bhounsule
Загружено: 2024-11-06
Просмотров: 178
Описание:
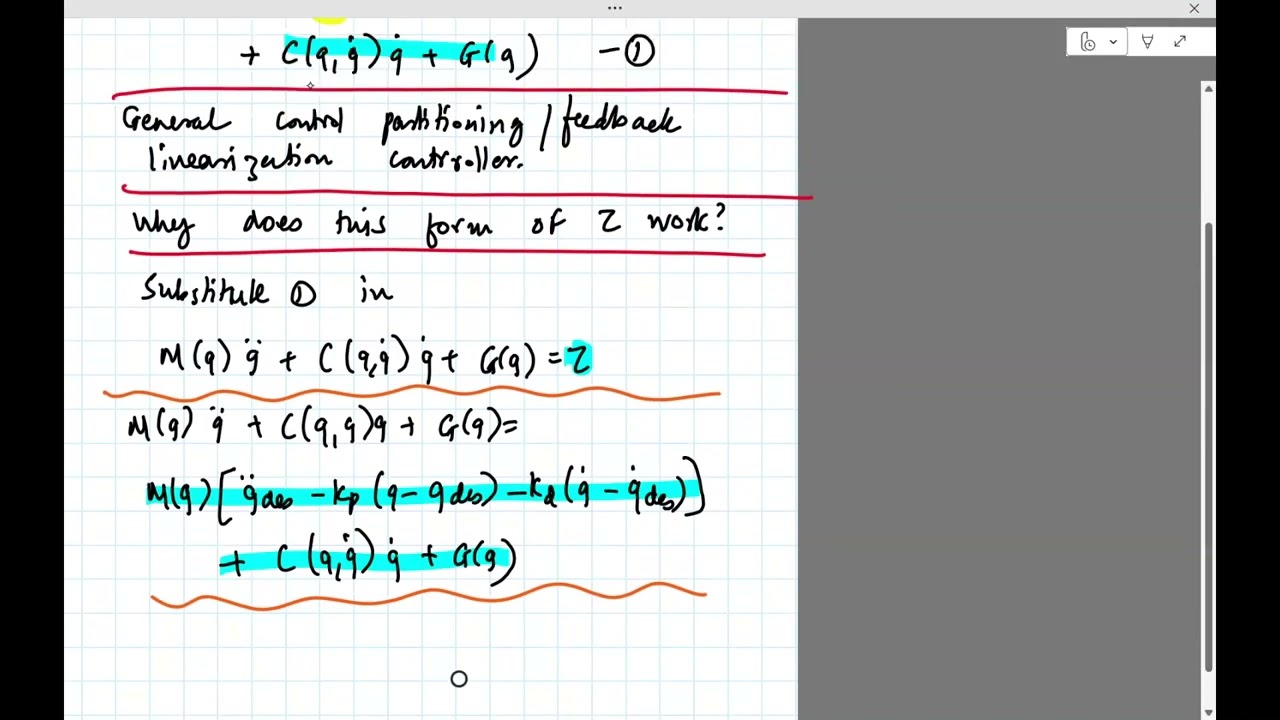
This video show how to modify the torque for trajectory tracking in joint space. Then using inverse kinematics and jacobian and its derivative it shows how one can do trajectory tracking in cartesian space.
All course material is here: tiny.cc/robotics24
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Доступные форматы для скачивания:
Скачать видео
-
Информация по загрузке:












![Как происходит модернизация остаточных соединений [mHC]](https://image.4k-video.ru/id-video/jYn_1PpRzxI)






