Integrated UAV Trajectory Optimization and Potential Field Approach for Dynamic Collision Avoidance
Автор: ARG-SnT-UL
Загружено: 2023-02-05
Просмотров: 872
Описание:
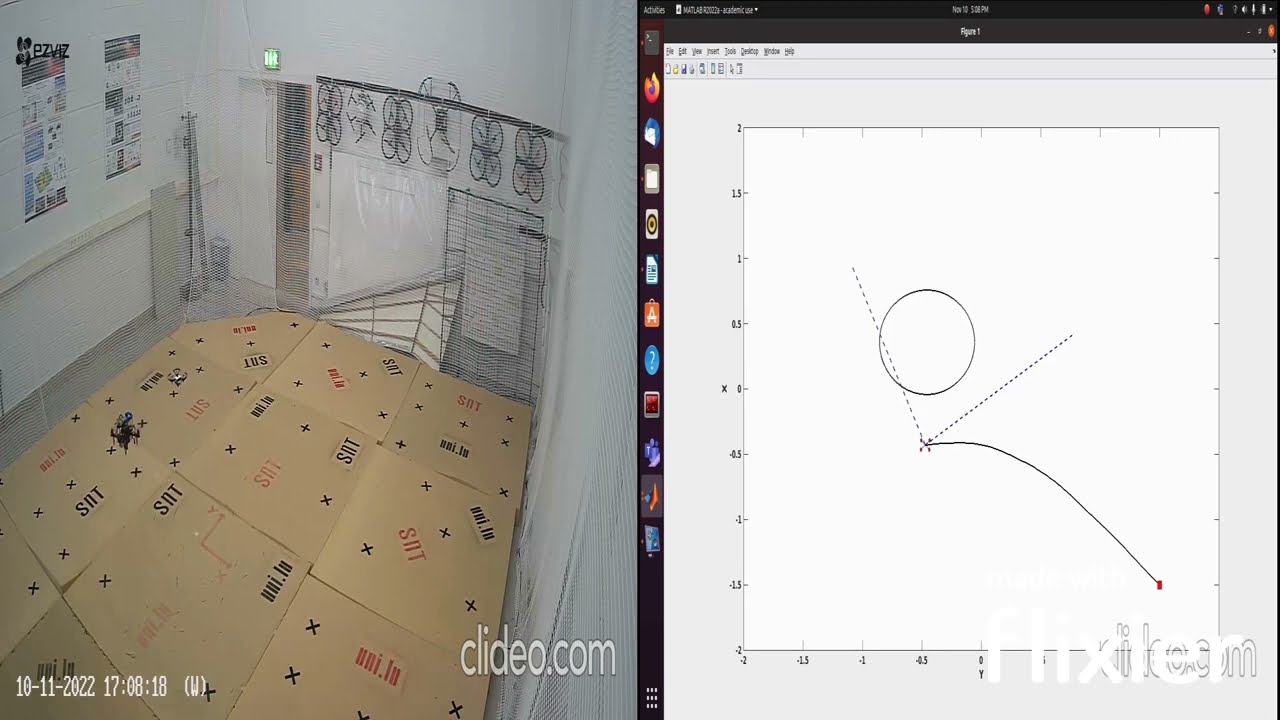
This work presents an integrated approach that combines trajectory optimization and Artificial Potential Field (APF) method for real-time optimal UAV trajectory planning and dynamic collision avoidance. A minimum-time trajectory optimization problem is formulated with initial and final positions as boundary conditions and collision avoidance as constraints. It is transcribed into a NLP problem using Chebyshev pseudospectral method. A novel sigmoid-type collision avoidance constraint is proposed to overcome the drawbacks of Lagrange polynomial approximation in pseudospectral methods that only guarantees inequality constraint satisfaction only at nodal points. Automatic differentiation of cost function and constraints is used to quickly determine their gradient and Jacobian, respectively.
This work is done in Automation and Robotics Research Group, Interdisciplinary Centre for Security, Reliability and Trust, University of Luxembourg
https://wwwfr.uni.lu/snt/research/aut...
https://wwwen.uni.lu/snt
Повторяем попытку...
Доступные форматы для скачивания:
Скачать видео
-
Информация по загрузке:



















