How a Self Driving Car Sees
Автор: AutoSysEng TV: System Architecture & Safety
Загружено: 2026-02-05
Просмотров: 10
Описание:
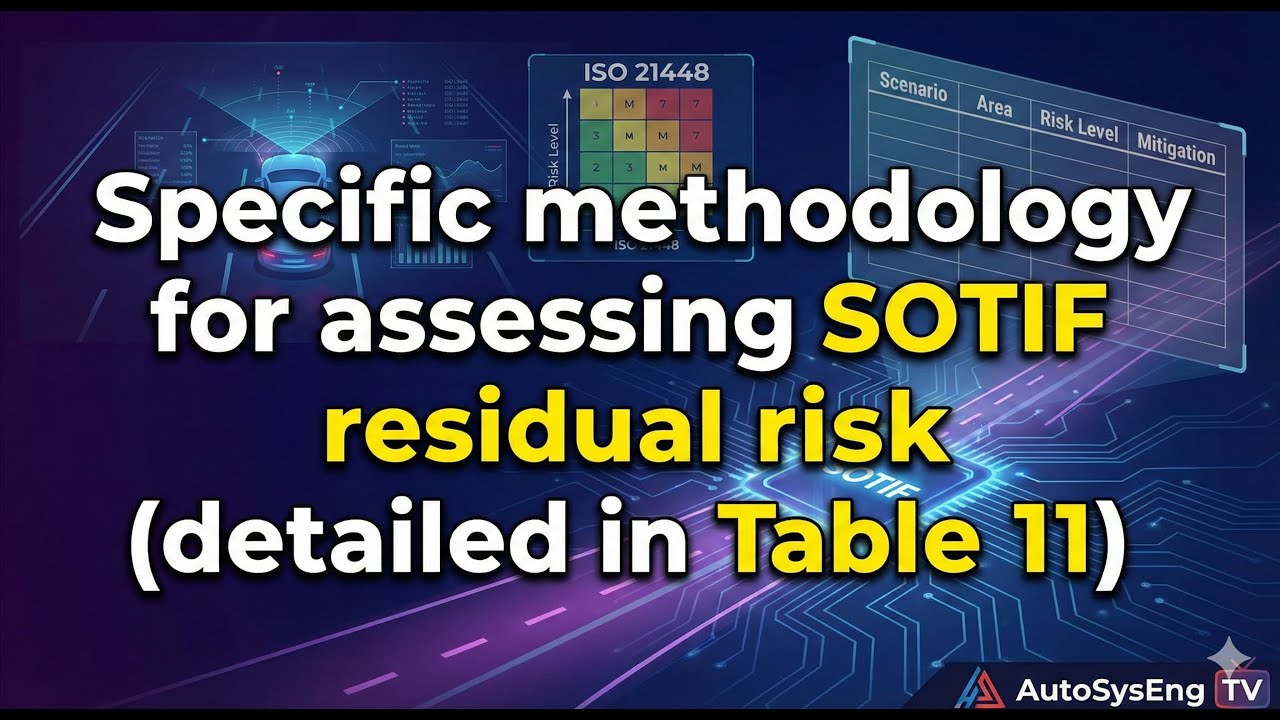
This video explores the core principles of SOTIF (Safety of the Intended Functionality) through a deep dive into autonomous vehicle perception systems.
Achieving safety in self-driving cars requires more than just avoiding system failures (Functional Safety); it requires addressing Functional Insufficiencies and Performance Limitations of sensors in diverse environmental conditions. We analyze how the "Sensor Team"—comprising Cameras, LiDAR, and Radar—works together through Sensor Fusion to mitigate risks and handle "Unknown Unsafe" scenarios.
Key Topics Covered:
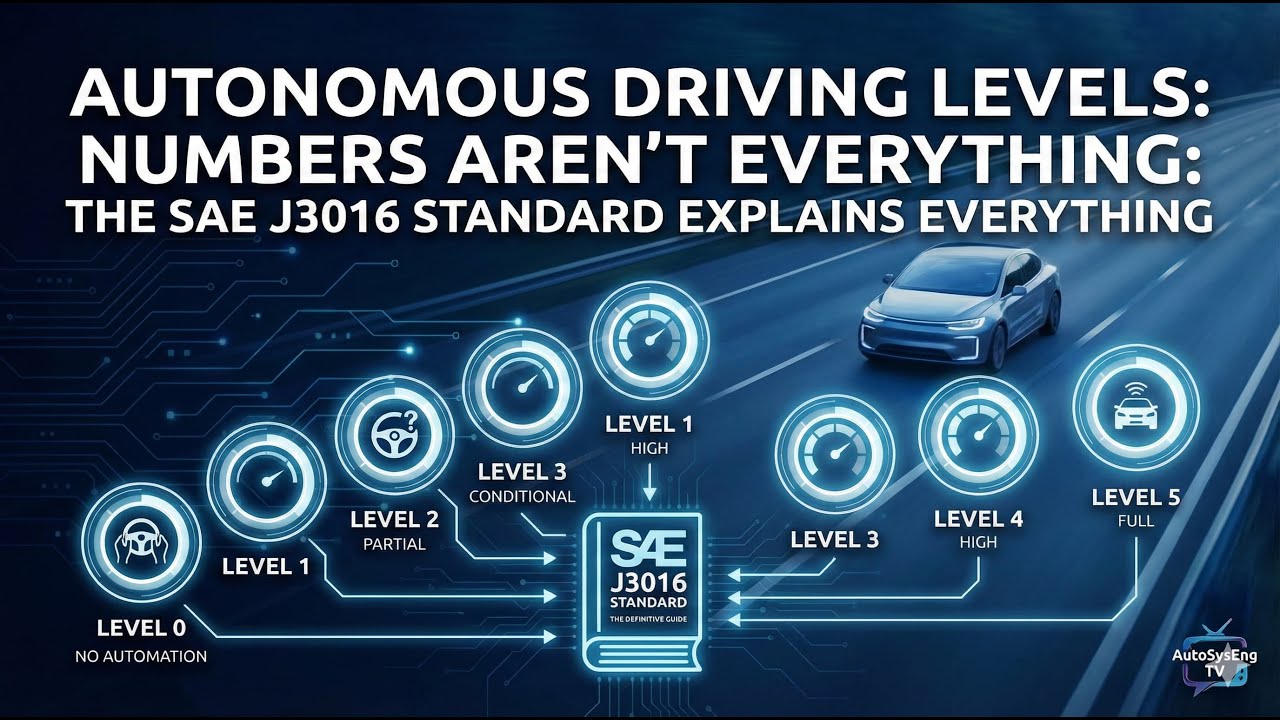
The relationship between sensor performance (Range, Resolution, Accuracy) and SOTIF.
How environmental factors like fog, rain, and lighting impact perception.
The role of Sensor Fusion in achieving a safe Operational Design Domain (ODD).
#SOTIF #ISO21448 #AutonomousDriving #FunctionalSafety #SensorFusion #SelfDrivingCars #ADAS
Повторяем попытку...
Доступные форматы для скачивания:
Скачать видео
-
Информация по загрузке: