Delta robot
Автор: Tullio Carlassara
Загружено: 2019-07-29
Просмотров: 13221
Описание:
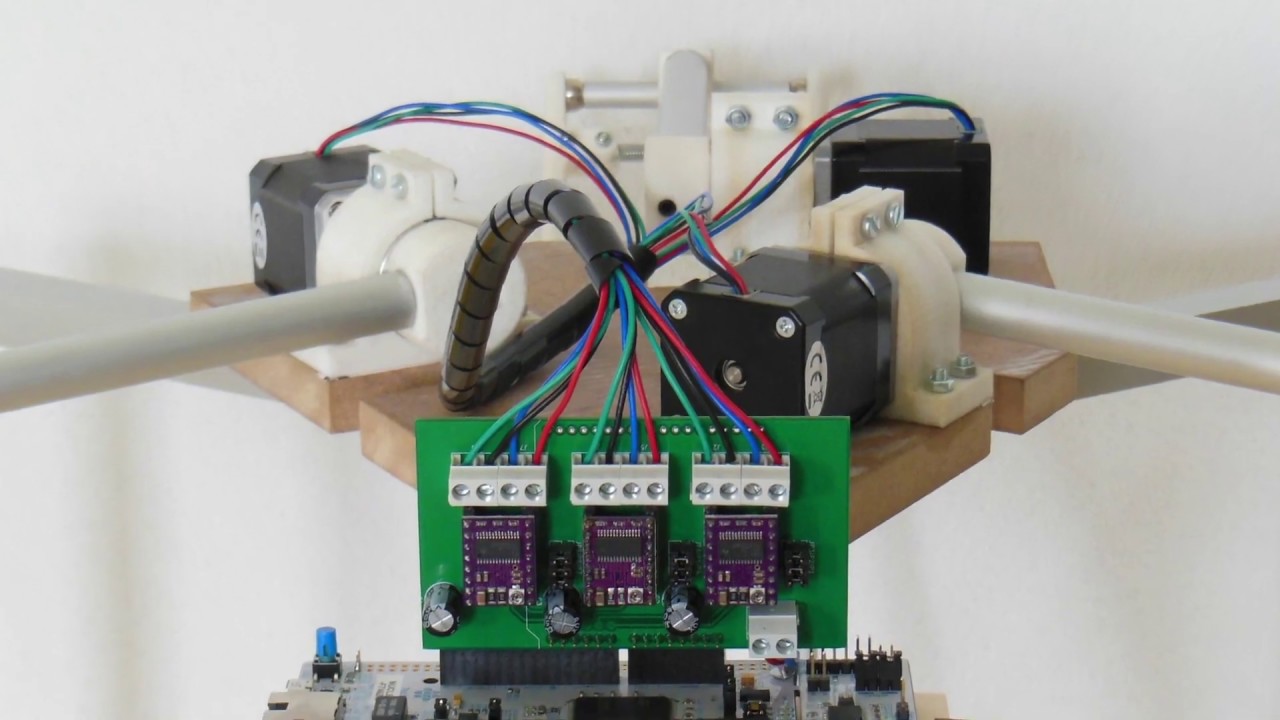
I used nema 17 stepper motors with 14: 1 planetary gearbox, DRV8825 drivers and a STM32 F746ZG microcontroller.
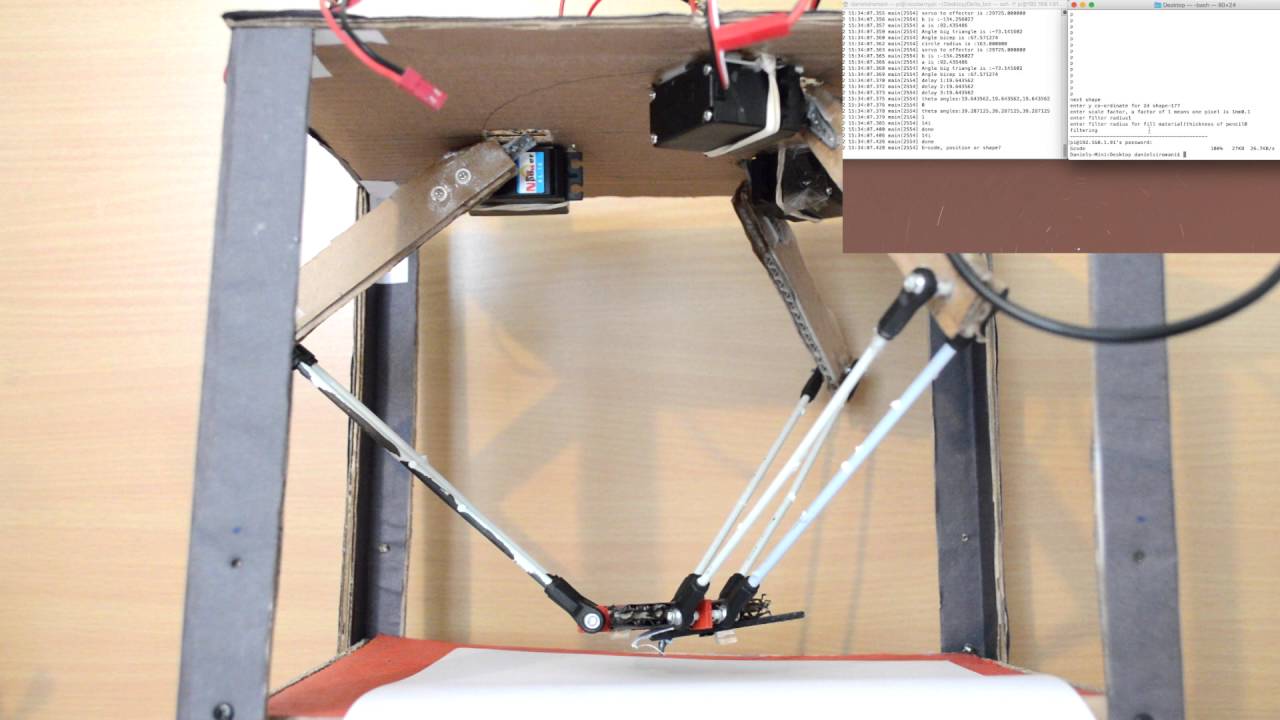
The path is defined in the pc by specifying a sequence of times and a sequence of points in cartesian coordinates. From the inverse kinematic analysis, for each point the angular positions of the single motors are obtained and therefore the number of steps.
Now the sequence of steps and the sequence of times are sent to the microcontroller where an algorithm calculates cubic Hermite spline to connect on the single motor the sections (between a point to the next point) that make up the path. With the spline the continuity of speed is imposed in crossing the points that define the path.
The direction and step signals (up to 80 kHz) are generated via interrupt.
Повторяем попытку...
Доступные форматы для скачивания:
Скачать видео
-
Информация по загрузке: