Intro2Robotics Lecture 22c: Artificial Potential Fields for Robot Path Planning
Автор: Aaron Becker
Загружено: 2017-11-11
Просмотров: 13325
Описание:
Lecture 22, part 3 of 3
1. • Intro2Robotics Lecture 22a: Path-planning,... Path planning with a 2-link robot
2. • Intro2Robotics Lecture 22b: Breadth-First ... Breadth First Search
3. • Intro2Robotics Lecture 22c: Artificial Pot... Artificial Potential Fields
Artificial Potential Fields are a search algorithm that incrementally explores Q_free while searching for a path. Why?
1. Hard to construct potential field in configuration space
2. Harder to compute the gradient of field on config space
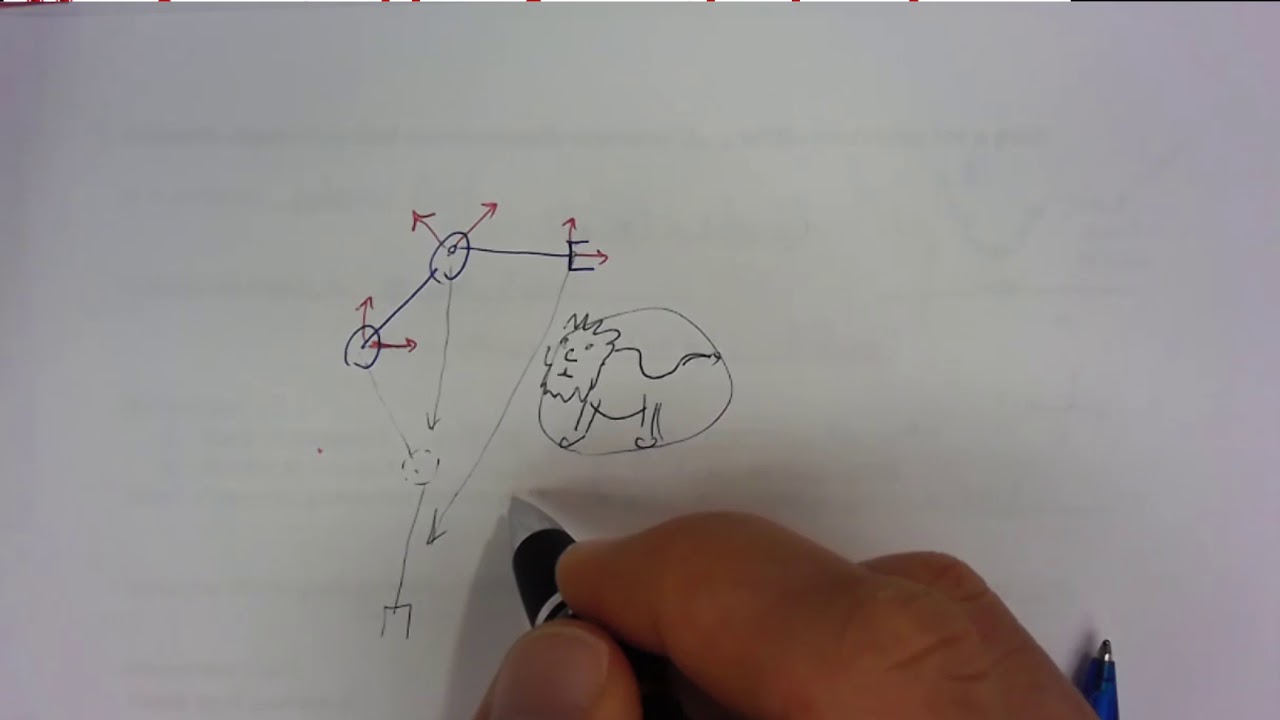
Instead, we will use workspace potential fields to attract origins of DH frames to goal locations while repelling them from obstacles.
This lecture shows how to construct potential wells that attract the robot to a goal: conic wells, parabolic wells, and a combination of the two.
Next it shows how to construct a repulsive force that repels robot from obstacles, never allow robot to collide with obstacle, and exerts little to no influence if robot is far away from this. The solution approaches infinity as approach obstacle, and decreases to zero at a specified distance.
Errata:
At 22:15 in the Urep equation, the whole parenthesis should be squared.
00:00 - A control law for path planning
Повторяем попытку...
Доступные форматы для скачивания:
Скачать видео
-
Информация по загрузке:



















