DiffBot ROS Hardware Interface with high level PID Controller #16
Автор: Franz Pucher
Загружено: 2020-11-23
Просмотров: 766
Описание:
ROS Hardware Interface PID Controller
Source code is hosted on Github: https://github.com/fjp/diffbot
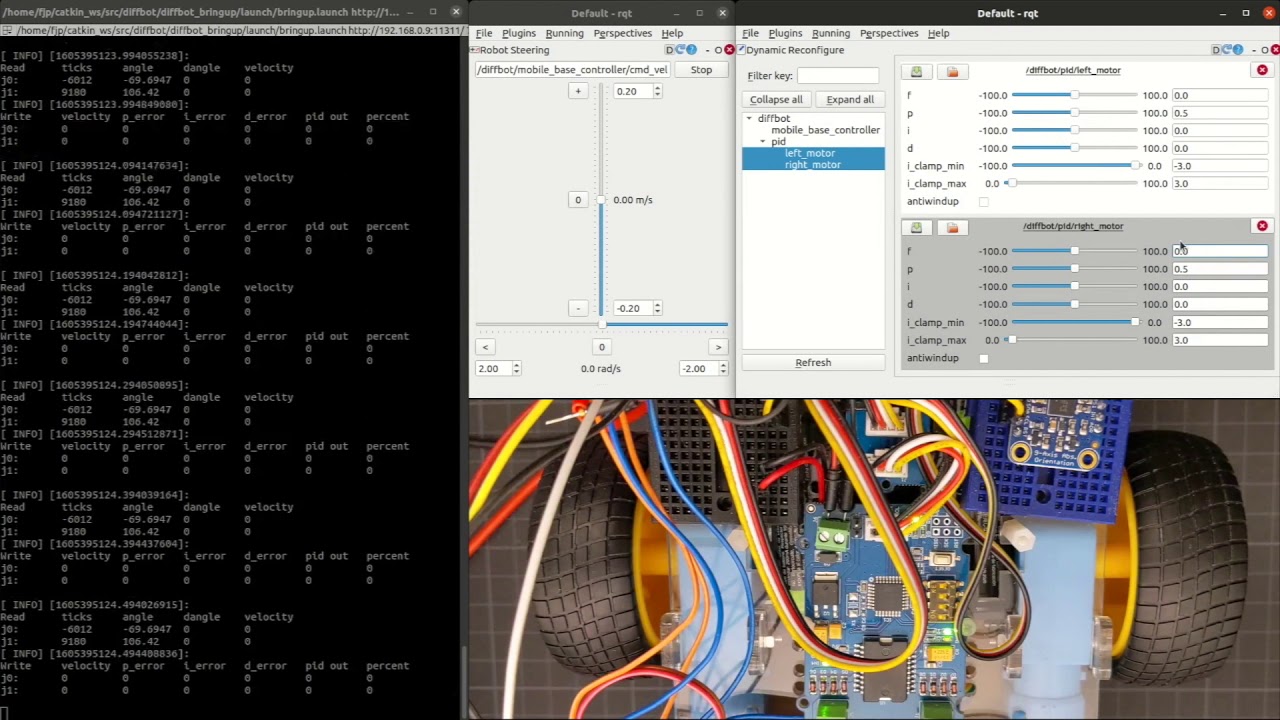
This video is part of Diffbot: https://fjp.at/projects/diffbot/ an autonomous robot running ROS Noetic on a Raspberry Pi. The motor is connected to the Grove I2C Motor Driver that is powerd with 10 Volt. The motor driver provides power to the two DG01E-E hobby motors where each includes a quadrature encoder. The signals of these encoders are measured with the Teensy 3.2 microcontroller and processed using rosserial.
The shown implementation of DiffBot's hardware_interface includes a high level PID controller running on the Raspberry Pi 4B. With the following PID values it is possible to drive straight when DiffBot is commanded to do so (motors operate at steady state). Near the stall point (low speed), driving straight is not always possible.
DG01E-E Hobby Motor with Quadrature Encoder: https://www.sparkfun.com/products/16413
Grove I2C Motor Driver v1.3: https://wiki.seeedstudio.com/Grove-I2...
#ROS #hardware_interface #pid #Diffbot #control
Music from https://www.epidemicsound.com/referra...
Повторяем попытку...
Доступные форматы для скачивания:
Скачать видео
-
Информация по загрузке:



















