DiffBot #12 Trouble driving straight with simple ROS Control Hardware Interface
Автор: Franz Pucher
Загружено: 2020-10-22
Просмотров: 820
Описание:
Source code is hosted on Github: https://github.com/fjp/diffbot
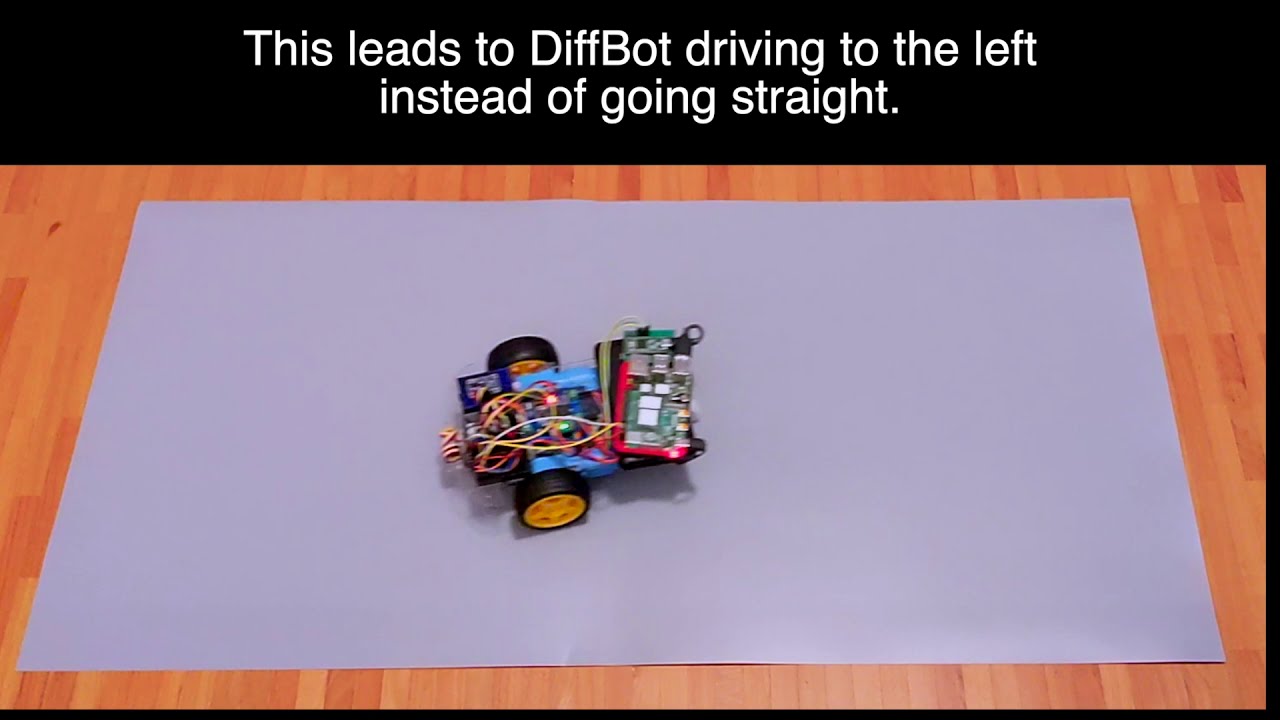
This video is part of Diffbot: https://fjp.at/projects/diffbot/ an autonomous robot running ROS Noetic on a Raspberry Pi. The motor is connected to the Grove I2C Motor Driver that is powerd with 10 Volt. The motor driver provides power to the two DG01E-E hobby motors where each includes a quadrature encoder. The signals of these encoders are measured with the Teensy 3.2 microcontroller and processed using rosserial.
The shown implementation of DiffBot's hardware_interface doesn't make it possible to drive straight when commanded to do so.
0:00 Examples of not driving straight when commanded to do so
0:27 Description of investigations
0:36 Slowly increasing the linear.x component
0:57 Test in reverse direction
1:43 Forward direction
2:18 Left and right turns
2:49 Quickly increasing throttle
3:05 Quick left and right
4:00 Possible Solutions
4:10 Threshold solution (not ideal solution)
4:21 Threshold solution results
4:51 New problem with (simple) threshold solution
5:21 PID
DG01E-E Hobby Motor with Quadrature Encoder: https://www.sparkfun.com/products/16413
Grove I2C Motor Driver v1.3: https://wiki.seeedstudio.com/Grove-I2...
Music from https://www.epidemicsound.com/referra...
Повторяем попытку...
Доступные форматы для скачивания:
Скачать видео
-
Информация по загрузке:






![ros2_control with ROS2 [1h20 Crash Course]](https://image.4k-video.ru/id-video/B9SbYjQSBY8)











