Verified Safety with Neural Barrier Functions: From Dynamical Systems to Language Models
Автор: IEEE Control Systems Society Security and Privacy
Загружено: 2026-01-24
Просмотров: 45
Описание:
Rising Star Symposium on Cyber-Physical Systems Security, Resilience, and Privacy
https://shorturl.at/C3RZy
By Hanjiang Hu from Carnegie Mellon University
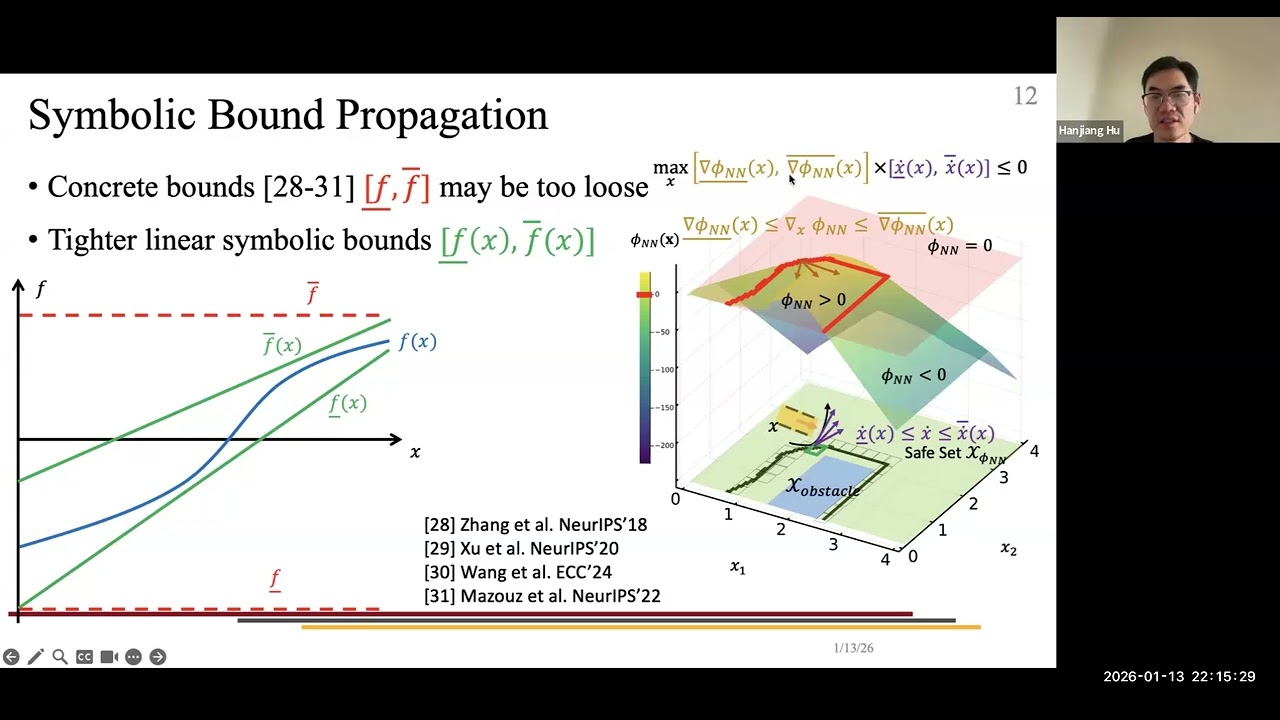
Safety is a fundamental requirement for deploying learning-based systems in the real world. From autonomous vehicles to large language model (LLM) based AI agents, guaranteeing that system trajectories remain within user-specified safety constraints. In this talk, I will present my work on verified safety with neural barrier functions, a unified framework that enables provable safety guarantees from neural dynamical systems to modern foundation models.
Повторяем попытку...
Доступные форматы для скачивания:
Скачать видео
-
Информация по загрузке: