Unified Incremental Nonlinear Transition Controller of a Hybrid Dual-Axis Tilting Rotor Quad-Plane
Автор: MAVLab TU Delft
Загружено: 2024-12-13
Просмотров: 373
Описание:
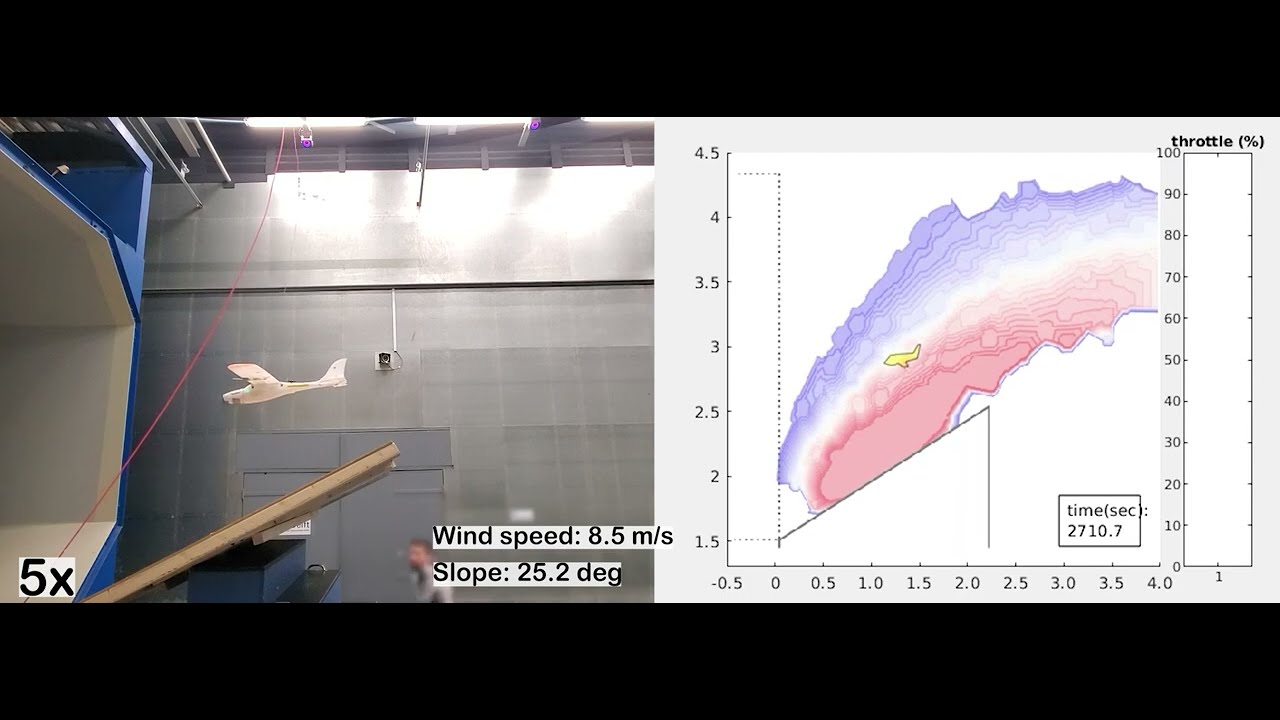
Hybrid Overactuated Tilt Rotor Uncrewed Aerial Vehicles (TRUAVs) are a category of versatile UAVs known for their exceptional wind resistance capabilities. However, their extensive operational range, combined with thrust vectoring capabilities, presents complex control challenges due to nonaffine dynamics and the necessity to coordinate lift and thrust for controlling accelerations at varying airspeeds. Traditionally, these vehicles rely on switched logic controllers with two or more intermediate states to control transitions. In this study, we introduce an innovative, unified incremental nonlinear controller designed to seamlessly control an overactuated dual-axis tilting rotor quad-plane throughout its entire flight envelope. Our controller is based on an incremental nonlinear control allocation algorithm to simultaneously generate pitch and roll commands, along with physical actuator commands. The control allocation problem is solved using a sequential quadratic programming (SQP) iterative optimization algorithm making it well-suited for the nonlinear actuator effectiveness typical of thrust vectoring vehicles. The controller's design integrates desired roll and pitch angle inputs. These desired attitude angles are managed by the controller and then conveyed to the vehicle during slow airspeed phases, when the vehicle maintains its 6-degrees of freedom (6-DOF). As the airspeed increases, the controller seamlessly shifts its focus to generating attitude commands for lift production, consequently smoothly disregarding the desired roll and pitch angles. Furthermore, our controller integrates an angle of attack (AoA) protection logic to mitigate wing stalling risks during transitions. It also features a yaw rate reference model to enable coordinated turns and minimize side-slip. The effectiveness of our proposed control technique has been confirmed through comprehensive flight tests. These tests demonstrated the successful transition from hovering flight to forward flight, the attainment of vertical and lateral accelerations, and the ability to revert to hovering.
This video is an attachment to the open-access IEEE Transactions on Robotics (TRO) publication, accessible at the following link:
https://doi.org/10.1109/TRO.2024.3498372
Повторяем попытку...

Доступные форматы для скачивания:
Скачать видео
-
Информация по загрузке: