DeReCo: Decoupling Representation and Coordination Learning for Object-Adaptive Decentralized Multi~
Автор: NAIST Robot Learning Lab
Загружено: 2026-03-10
Просмотров: 200
Описание:
DeReCo: Decoupling Representation and Coordination Learning for Object-Adaptive Decentralized Multi-Robot Cooperative Transport
Kazuki Shibata, Ryosuke Sota, Shandil Dhiresh Bosch, Yuki Kadokawa, Tsurumine Yoshihisa, and Takamitsu Matsubara
https://arxiv.org/abs/2603.08111
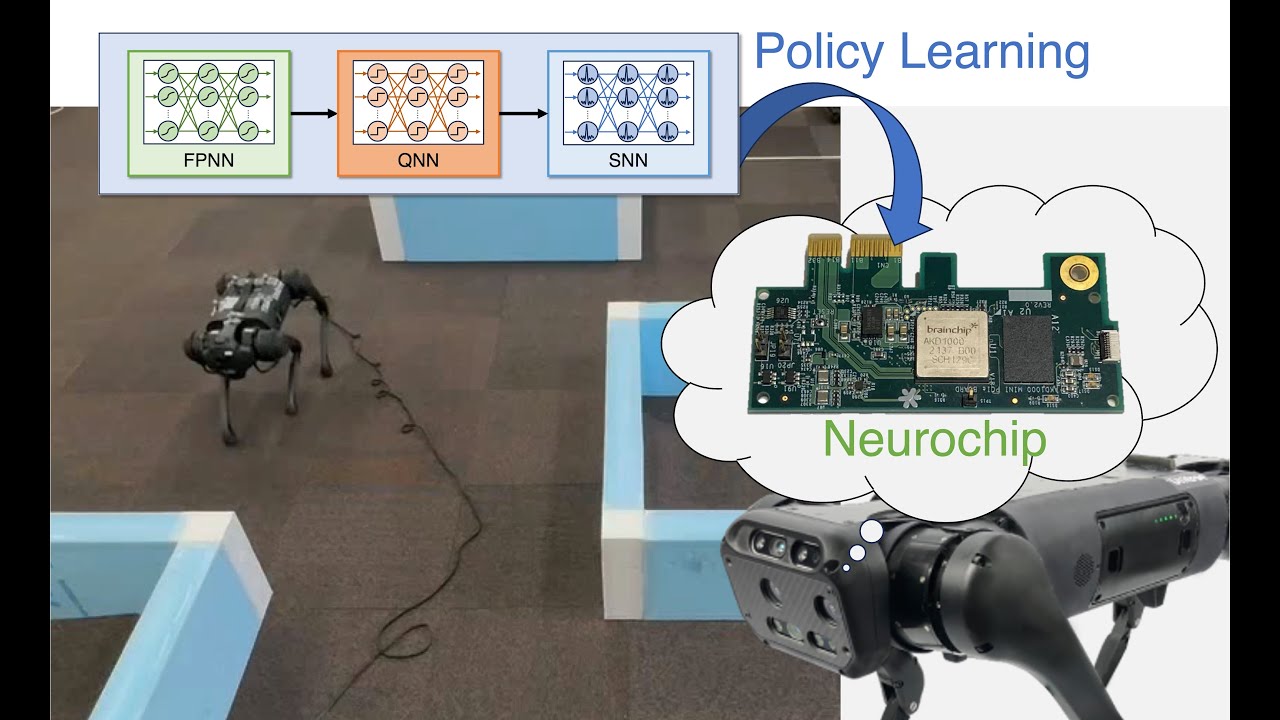
Generalizing decentralized multi-robot cooperative transport across objects with diverse shapes and physical properties remains a fundamental challenge. Under decentralized execution, two key challenges arise: object-dependent representation learning under partial observability and coordination learning in multi-agent reinforcement learning (MARL) under non-stationarity. A typical approach jointly optimizes object-dependent representations and coordinated policies in an end-to-end manner while randomizing object shapes and physical properties during training. However, this joint optimization tightly couples representation and coordination learning, introducing bidirectional interference: inaccurate representations under partial observability destabilize coordination learning, while non-stationarity in MARL further degrades representation learning, resulting in sample-inefficient training. To address this structural coupling, we propose DeReCo, a novel MARL framework that decouples representation and coordination learning for object-adaptive multi-robot cooperative transport, improving sample efficiency and generalization across objects and transport scenarios. DeReCo adopts a three-stage training strategy: (1) centralized coordination learning with privileged object information, (2) reconstruction of object-dependent representations from local observations, and (3) progressive removal of privileged information for decentralized execution. This decoupling mitigates interference between representation and coordination learning and enables stable and sample-efficient training. Experimental results show that DeReCo outperforms baselines in simulation on three training objects, generalizes to six unseen objects with varying masses and friction coefficients, and achieves superior performance on two unseen objects in real-robot experiments. The demonstration video is available at https://sites.google.com/view/multi-h....
Повторяем попытку...

Доступные форматы для скачивания:
Скачать видео
-
Информация по загрузке:









![Эффект Джанибекова [Veritasium]](https://imager.clipsaver.ru/N9HlQ-XVnFk/max.jpg)