6-Axis Robotic Manipulator URDF: Simulation in ROS 2 Humble
Автор: FusyBots: Mobility, Geometry & Perception
Загружено: 2024-08-16
Просмотров: 318
Описание:
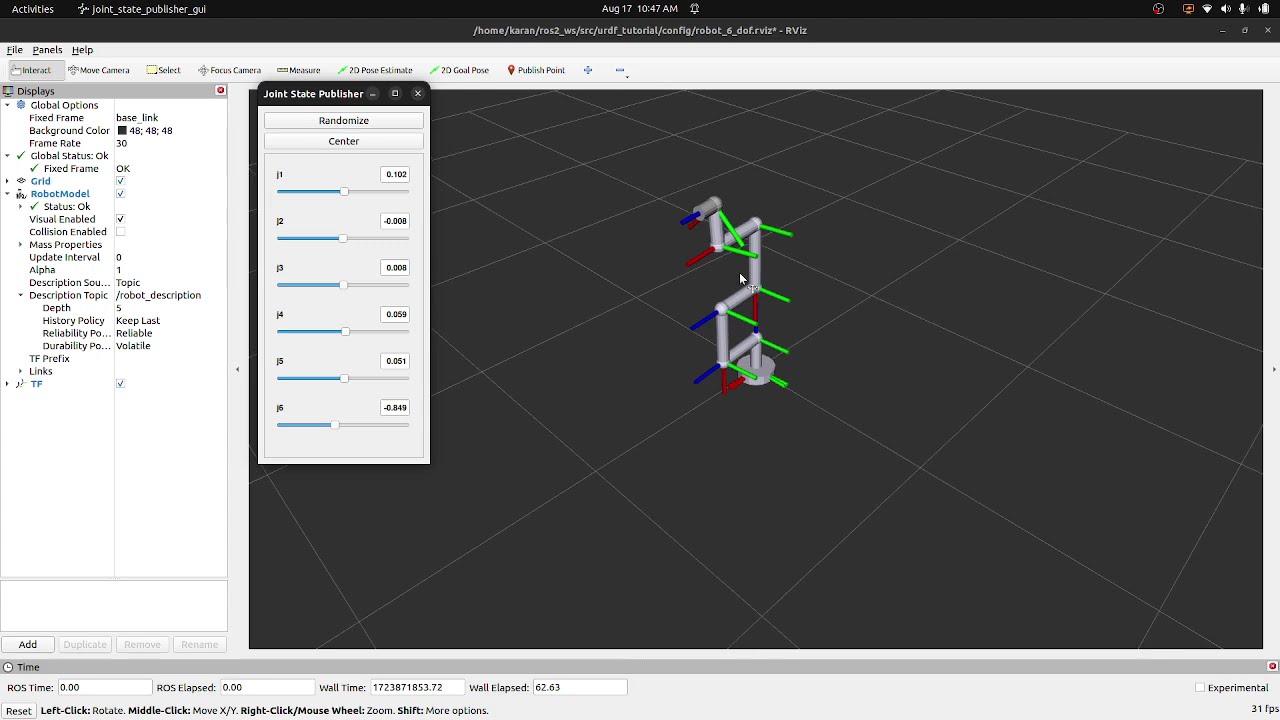
Welcome to our detailed tutorial on creating and simulating a 6-axis robotic manipulator URDF in ROS 2! In this video, we cover:
**Introduction**: Overview of the 6-axis manipulator.
**Simulation**: Simulating the manipulator in RViz using ROS 2.
**Visual Demonstration**: Watch the manipulator in action with a full simulation setup.
**Tips & Tricks**: Best practices for modeling and simulating robotic manipulators.
🔧 **What You'll Learn**:
Creating a URDF file from scratch
Setting up the robot's links, joints, and kinematics
Integrating the URDF with ROS 2 tools
Visualizing and testing in RViz and Gazebo
📂 **Resources**:
[ROS 2 Documentation](https://docs.ros.org/en/humble/index....)
[RViz Tutorial](https://docs.ros.org/en/humble/Tutori...)
👍 If you find this video helpful, please give it a thumbs up, subscribe, and click the bell icon for more robotics tutorials!
📩 *Questions or Feedback?* Leave a comment below.
#Robotics #URDF #ROS2 #Simulation #RViz #Gazebo #RoboticManipulator #RoboticsTutorial
Повторяем попытку...
Доступные форматы для скачивания:
Скачать видео
-
Информация по загрузке:



















