Creating a URDF File for a 6DOF (6-Axis) Manipulator in ROS 2 & Visualize in RViz
Автор: FusyBots: Mobility, Geometry & Perception
Загружено: 2024-08-24
Просмотров: 560
Описание:
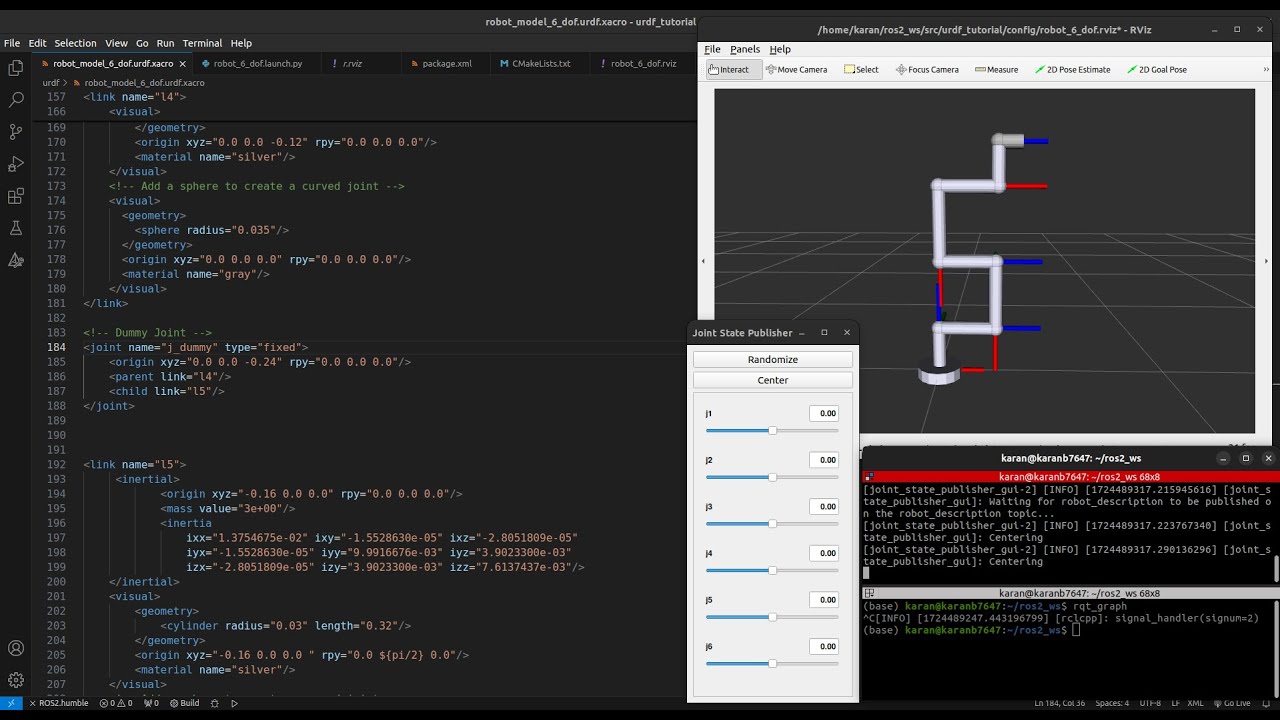
🚀 Learn how to create a URDF file for a 6-axis robotic manipulator in ROS 2 and visualize it in RViz! In this step-by-step tutorial, I'll guide you through creating the URDF file, setting up the ROS 2 package, and launching your robot in RViz. By the end of this video, you'll have a fully functional URDF model ready for simulation.
👉 Download the full code from my GitHub repository: [https://github.com/karansspk462000/]
Also visit my blog at:
https://www.fusybots.com/post/underst...
📌 *Content:*
Introduction
Creating the URDF File
Setting Up ROS 2 Package
Visualizing in RViz
GitHub Link & Resources
📚 *Resources:*
ROS 2 Documentation: https://docs.ros.org/en/foxy/index.html
URDF Documentation: https://wiki.ros.org/urdf
RViz Documentation: https://wiki.ros.org/rviz
🎯 *Topics Covered:*
Creating a URDF file in ROS 2
Setting up a ROS 2 package
Visualizing robots in RViz
6-axis robotic manipulator
💬 *Question for You:* What other ROS 2 tutorials would you like to see next? Comment below!
👍 If you enjoyed the video, make sure to give it a thumbs up and subscribe for more robotics and ROS content. Don’t forget to hit the bell icon to get notified whenever I upload a new video!
#ROS2 #URDF #RViz #RobotSimulation #Robotics #OpenSource #6DOFRobot #ROS2Tutorial #RoboticsWithROS2 #ROS2Humble
Повторяем попытку...
Доступные форматы для скачивания:
Скачать видео
-
Информация по загрузке:



















