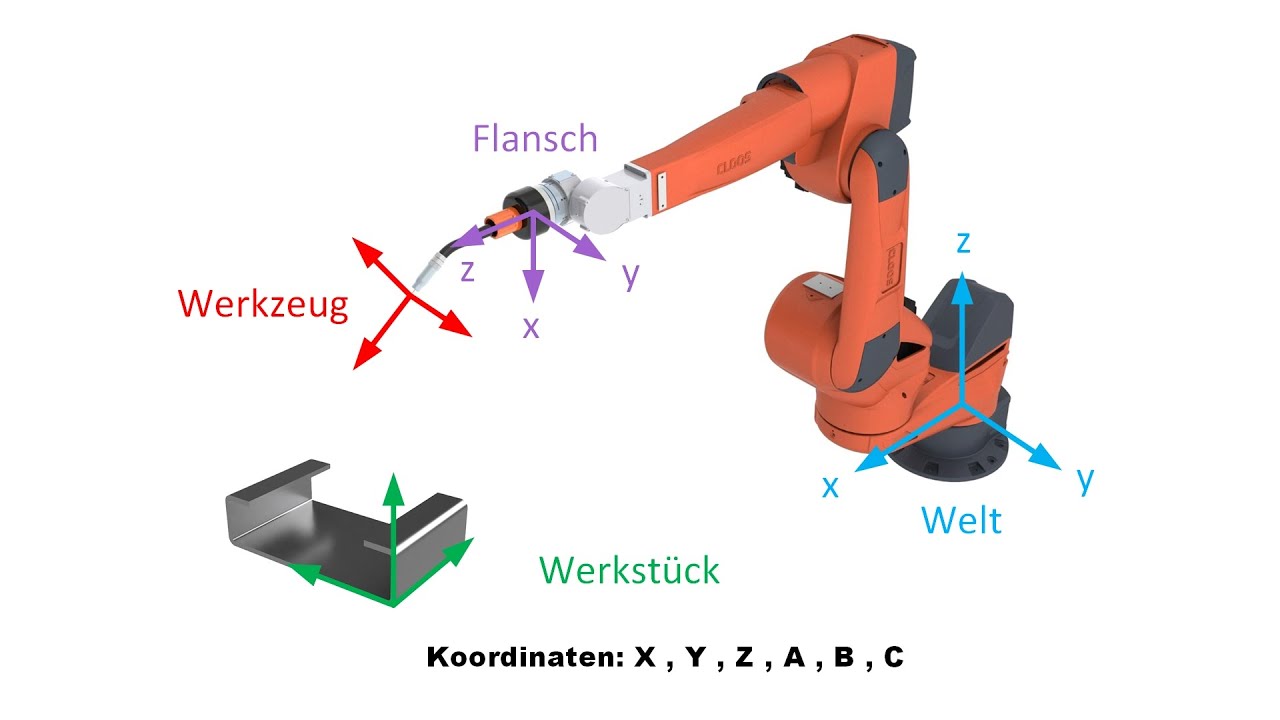
Industrieroboter - Tool Center Point (TCP) und 3 Koordinatensysteme
Автор: Next Robotics
Загружено: 2019-02-07
Просмотров: 21745
Описание:
Teil 3 unserer Industrieroboter-Tutorials mit roboterforum.de - Dieses Mal: Industrieroboter richtig bewegen. So richten Sie den Tool Center Point (TCP) in wenigen Schritten ein und diese 3 Koordinatensysteme sollten Sie kennen!
--------------------------
► Next Robotics ist der Kanal für die professionelle Robotik! Gemeinsam mit Ihnen möchten wir eine Community aufbauen - mit Fragen, Antworten & Meinungen rund um das Thema Roboter. Jetzt abonnieren und keine Topmeldung mehr verpassen!
/ @nextrobotics
--------------------------
► Mein zweiter Kanal:
/ dermachinarius
--------------------------
https://www.roboterforum.de
https://www.robtec.de/
--------------------------
Hintergrundberichte, Zusatzinfos, Interviews in voller Länge und Reportagen zur professionellen Robotik auf: https://www.ke-next.de/robotik.html
---------------------------
Folgen Sie uns auch auf:
► Facebook: https://www.facebook.com/ke.next?fref=ts
► Google+: https://plus.google.com/+KonstruktionDe
►Twitter: / ke_next
► Weitere Kanäle: / kenexttv
Повторяем попытку...

Доступные форматы для скачивания:
Скачать видео
-
Информация по загрузке: