Large-scale Autonomous Flight with Real-time Semantic SLAM under Dense Forest Canopy
Автор: Vijay Kumar
Загружено: 2021-09-17
Просмотров: 11971
Описание:
Paper: https://arxiv.org/abs/2109.06479
5-min voice-over version: • Large-scale Autonomous Flight with Real-ti...
Code (released on 02/22/2022): https://github.com/KumarRobotics/kr_a... (autonomous flight system) and https://github.com/KumarRobotics/sloam (semantic SLAM algorithm)
Abstract:
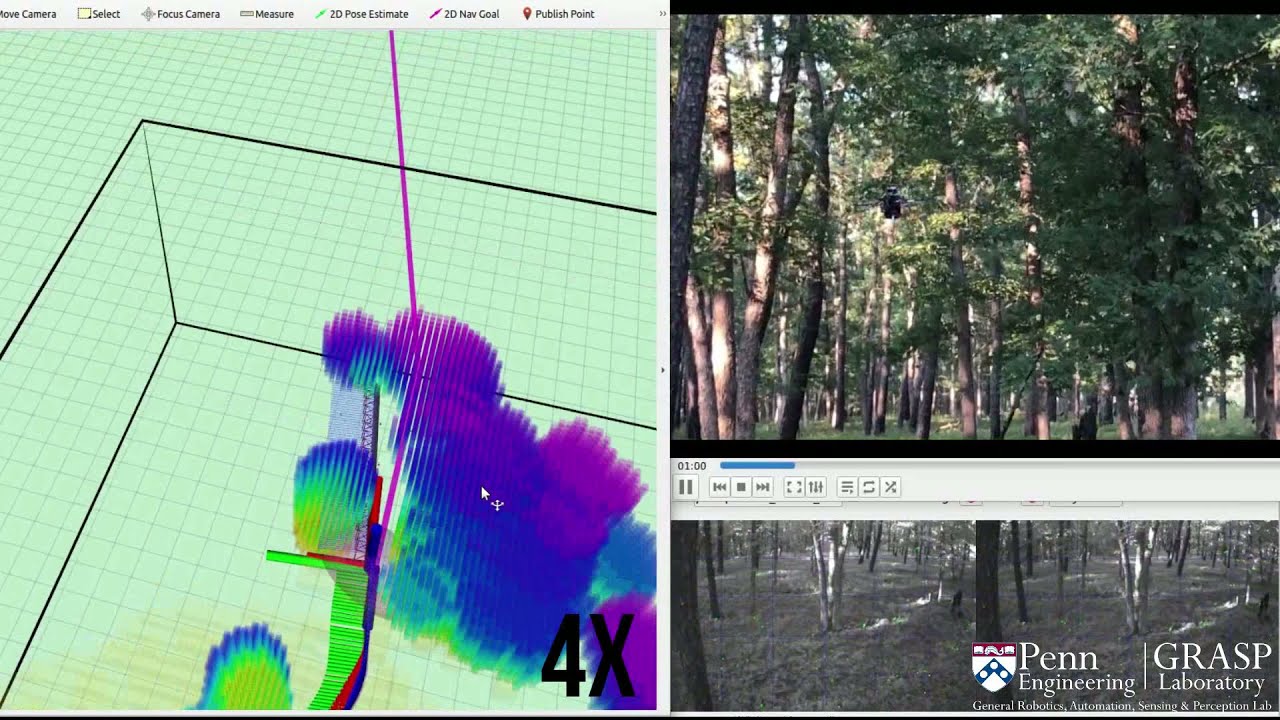
Semantic maps represent the environment using a set of semantically meaningful objects. This representation is storage-efficient, less ambiguous, and more informative, thus facilitating large-scale autonomy and the acquisition of actionable information in highly unstructured, GPS-denied environments. In this letter, we propose an integrated system that can perform large-scale autonomous flights and real-time semantic mapping in challenging under-canopy environments. We detect and model tree trunks and ground planes from LiDAR data, which are associated across scans and used to constrain robot poses as well as tree trunk models. The autonomous navigation module utilizes a multi-level planning and mapping framework and computes dynamically feasible trajectories that lead the UAV to build a semantic map of the user-defined region of interest in a computationally and storage efficient manner. A drift-compensation mechanism is designed to minimize the odometry drift using semantic SLAM outputs in real time, while maintaining planner optimality and controller stability. This leads the UAV to execute its mission accurately and safely at scale.
Acknowledgement:
This work was supported by funding from the the IoT4Ag Engineering Research Center funded by the National Science Foundation (NSF) under NSF Cooperative Agreement Number EEC-1941529, and C-BRIC, a Semiconductor Research Corporation Joint University Microelectronics Program program cosponsored by DARPA. This work was also partially supported by INCT-INSac grants CNPq 465755/2014-3, FAPESP 2014/50851-0, and 2017/17444-0. We gratefully acknowledge the Distributed and Collaborative Intelligent Systems and Technology Collaborative Research Alliance (DCIST) team for building the simulation infrastructure, and New Jersey State Forestry Services staff for supporting experiments in the Wharton State Forest. We also thank Dr. Avraham Cohen for the original design of Falcon 4 platform, Dr. Ke Sun and Dr. Kartik Mohta for their insights and help regarding autonomous flight system development and field experiments, and Dr. Luiz Rodriguez for the over-canopy LIDAR data.
Повторяем попытку...
Доступные форматы для скачивания:
Скачать видео
-
Информация по загрузке: