Lesson 3: Geometric Lateral Control - Stanley - Introduction to Self-Driving Cars
Автор: Ta Hai Dang
Загружено: 2020-11-09
Просмотров: 7836
Описание:
Link to this course:
https://click.linksynergy.com/deeplin...
Lesson 3: Geometric Lateral Control - Stanley - Introduction to Self-Driving Cars
Self-Driving Cars Specialization
Welcome to Introduction to Self-Driving Cars, the first course in University of Toronto’s Self-Driving Cars Specialization.
This course will introduce you to the terminology, design considerations and safety assessment of self-driving cars. By the end of this course, you will be able to:
Understand commonly used hardware used for self-driving cars
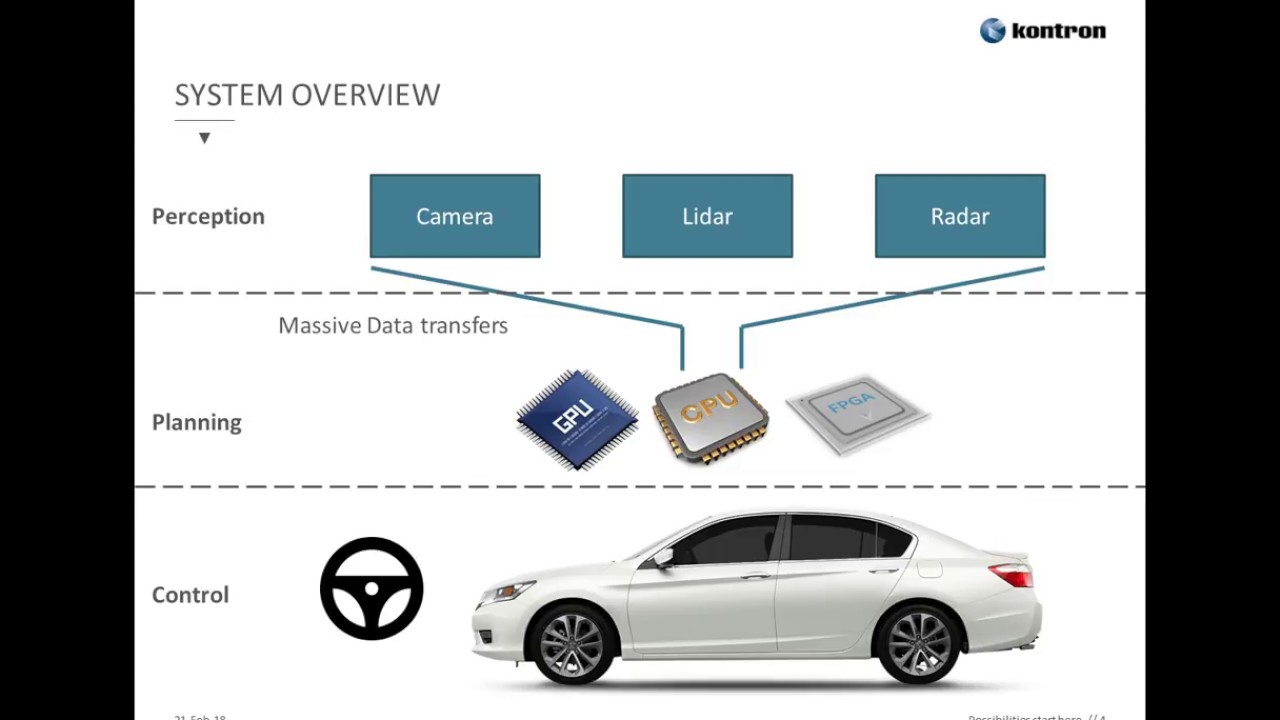
Identify the main components of the self-driving software stack
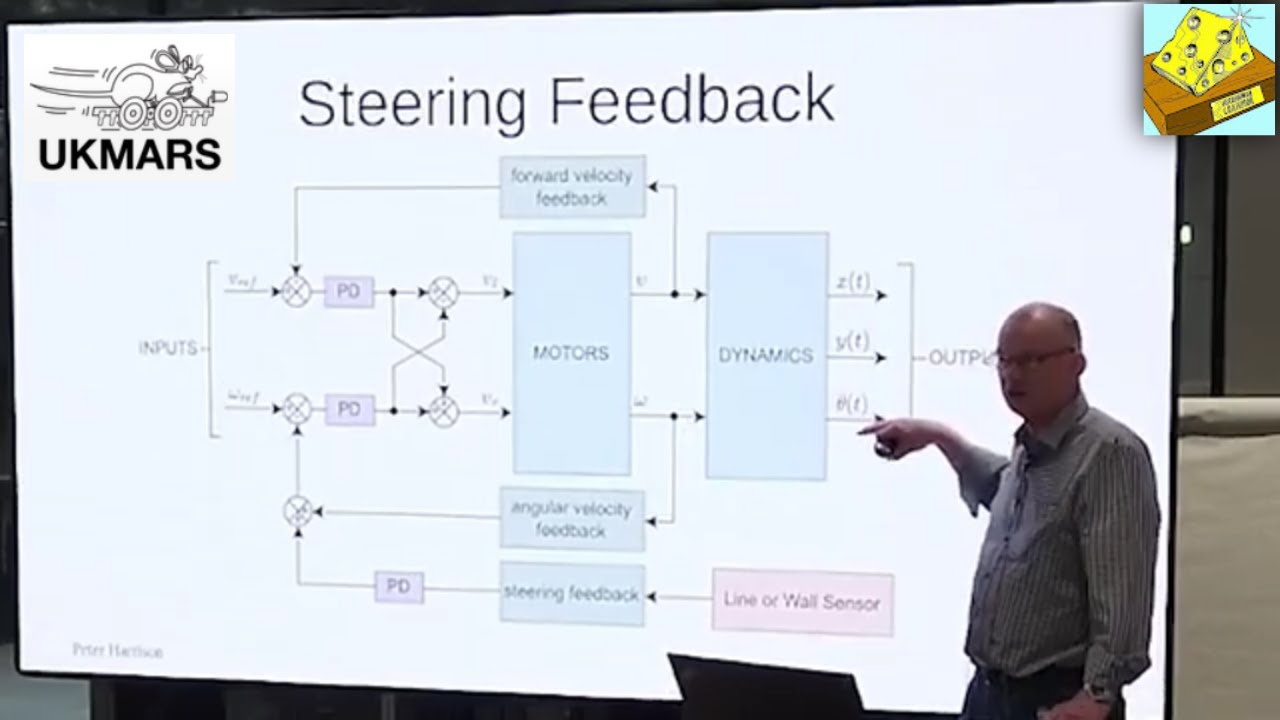
Program vehicle modelling and control
Analyze the safety frameworks and current industry practices for vehicle development
For the final project in this course, you will develop control code to navigate a self-driving car around a racetrack in the CARLA simulation environment. You will construct longitudinal and lateral dynamic models for a vehicle and create controllers that regulate speed and path tracking performance using Python. You’ll test the limits of your control design and learn the challenges inherent in driving at the limit of vehicle performance.
This is an advanced course, intended for learners with a background in mechanical engineering, computer and electrical engineering, or robotics. To succeed in this course, you should have programming experience in Python 3.0, familiarity with Linear Algebra (matrices, vectors, matrix multiplication, rank, Eigenvalues and vectors and inverses), Statistics (Gaussian probability distributions), Calculus and Physics (forces, moments, inertia, Newton's Laws).
You will also need certain hardware and software specifications in order to effectively run the CARLA simulator: Windows 7 64-bit (or later) or Ubuntu 16.04 (or later), Quad-core Intel or AMD processor (2.5 GHz or faster), NVIDIA GeForce 470 GTX or AMD Radeon 6870 HD series card or higher, 8 GB RAM, and OpenGL 3 or greater (for Linux computers).
i am very much enjoyed the course and learned new concepts. Really it is a very nice program and the presentation gives friendly environment to understand the concepts. Thank you,A well-rounded introductory course! I would like to take this opportunity to thank the instructors for designing such an amazing course for students aspiring to enter this field.
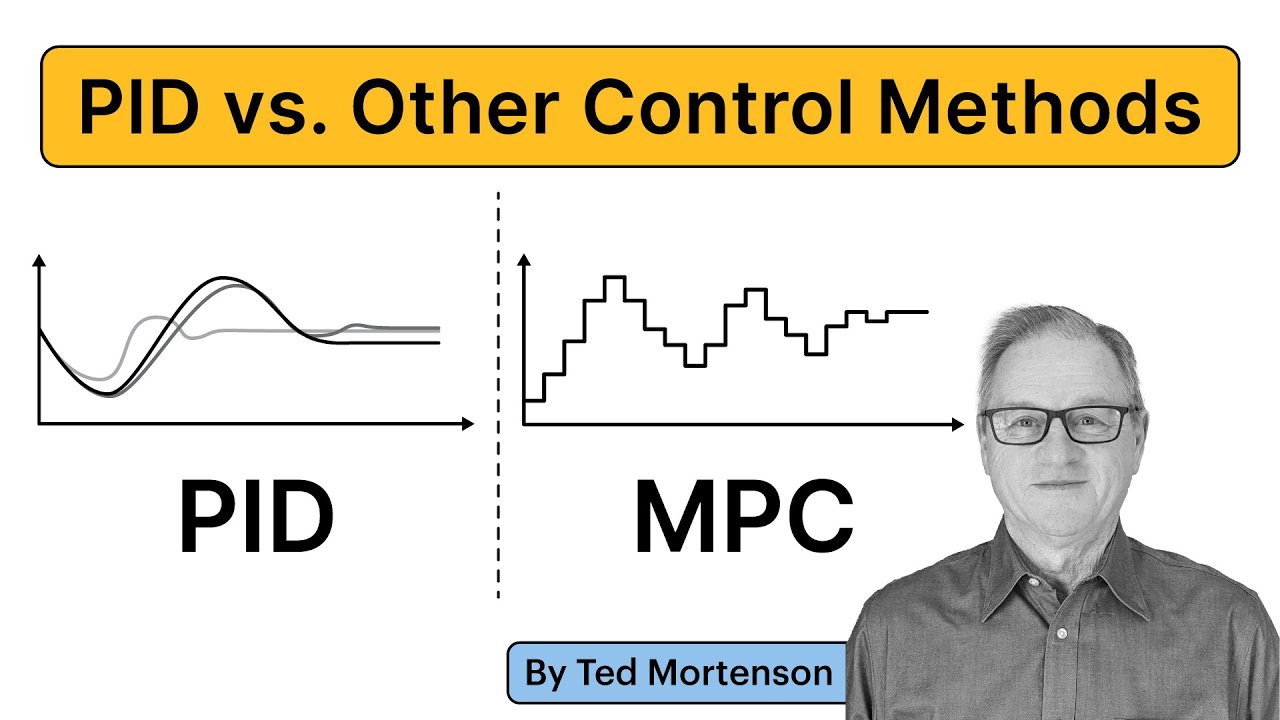
This week, you will learn about how lateral vehicle control ensures that a fixed path through the environment is tracked accurately. You will see how to define geometry of the path following control problem and develop both a simple geometric control and a dynamic model predictive control approach.
Lesson 3: Geometric Lateral Control - Stanley - Introduction to Self-Driving Cars
Copyright Disclaimer under Section 107 of the copyright act 1976, allowance is made for fair use for purposes such as criticism, comment, news reporting, scholarship, and research. Fair use is a use permitted by copyright statute that might otherwise be infringing. Non-profit, educational or personal use tips the balance in favour of fair use.
Повторяем попытку...

Доступные форматы для скачивания:
Скачать видео
-
Информация по загрузке: