Modern Robotics, Chapter 13.3.1: Modeling of Nonholonomic Wheeled Mobile Robots
Автор: Northwestern Robotics
Загружено: 2018-03-16
Просмотров: 45285
Описание:
This is a video supplement to the book "Modern Robotics: Mechanics, Planning, and Control," by Kevin Lynch and Frank Park, Cambridge University Press 2017. See http://modernrobotics.org for information on the book, free software, and other materials.
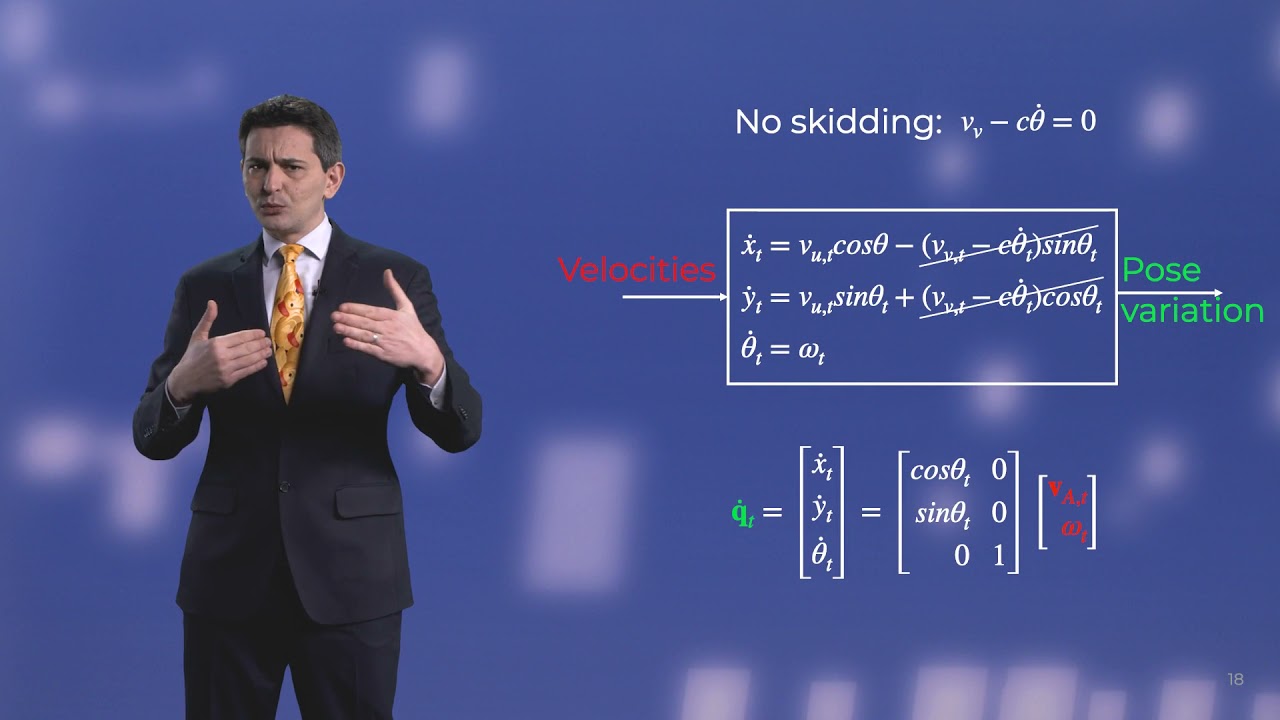
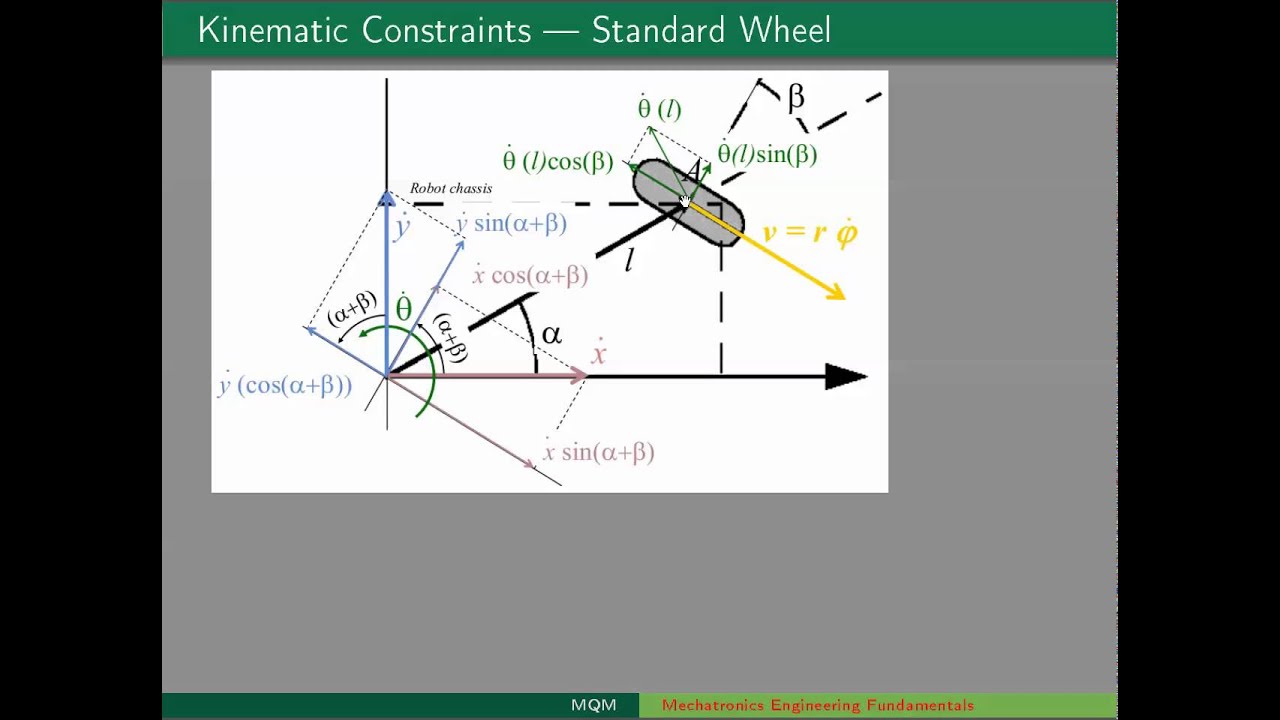
This video introduces kinematic modeling of nonholonomic wheeled mobile robots and a single canonical model for car-like, diff-drive, and unicycle robots.
This video is a brief summary of material from the book, and it is not meant to stand alone. For more details, such as an explanation of the notation, please consult the book and the other videos.
Playlist for Chapter 13: • Modern Robotics, Chapter 13: Wheeled Mobi...
Playlist for all book videos: • Modern Robotics, All Videos
YouTube channel with all playlists: / kevinl2145
Wiki for the book, including software and other supplements: http://modernrobotics.org
Modern Robotics is now a series of online courses on Coursera! https://www.coursera.org/specializati...
Повторяем попытку...

Доступные форматы для скачивания:
Скачать видео
-
Информация по загрузке: