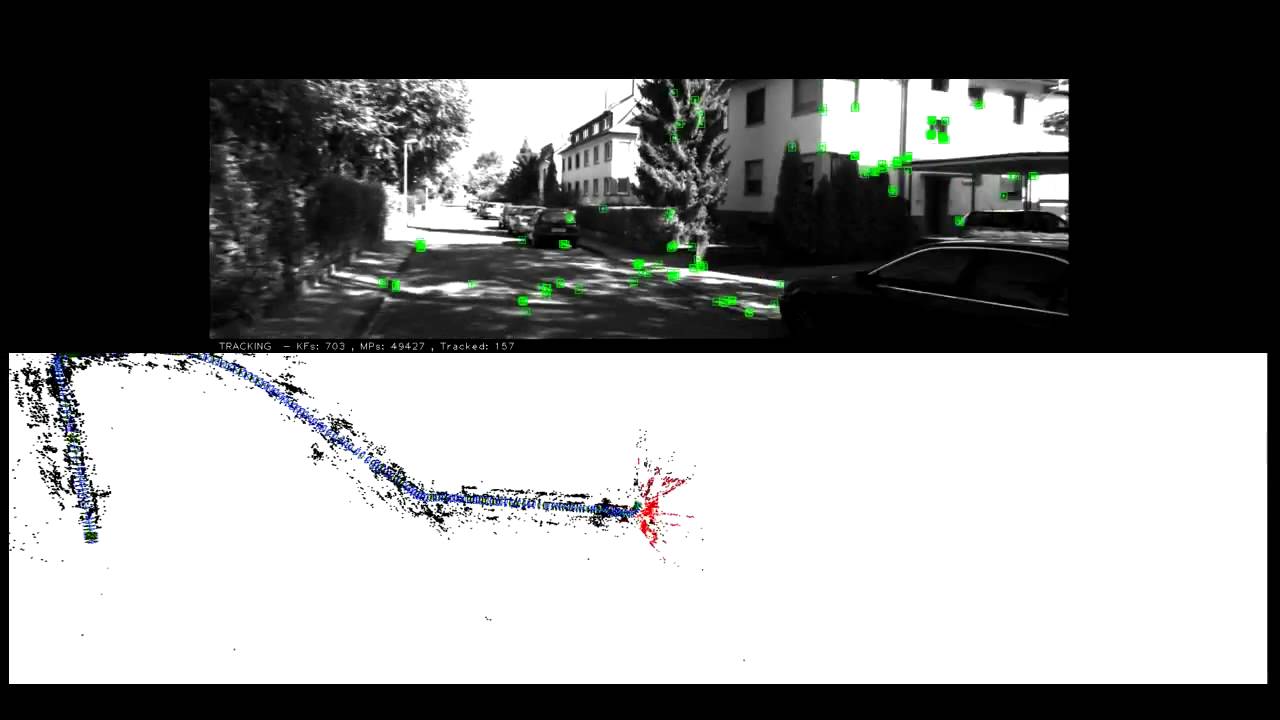
ORB-SLAM in the KITTI dataset (Sequence 00)
Автор: Raúl Mur Artal
Загружено: 2015-02-06
Просмотров: 56080
Описание:
Visit the project webpage: http://webdiis.unizar.es/~raulmur/orb...
Source Code available: https://github.com/raulmur/ORB_SLAM
ORB-SLAM is a versatile and accurate Monocular SLAM solution able to compute in real-time the camera trajectory and a sparse 3D reconstruction of the scene in a wide variety of environments, ranging from small hand-held sequences of a desk to a car driven around several city blocks. It is able to close large loops and perform global relocalisation in real-time and from wide baselines. It includes an automatic and robust initialization from planar and non-planar scenes.
Повторяем попытку...
Доступные форматы для скачивания:
Скачать видео
-
Информация по загрузке: