Скачать
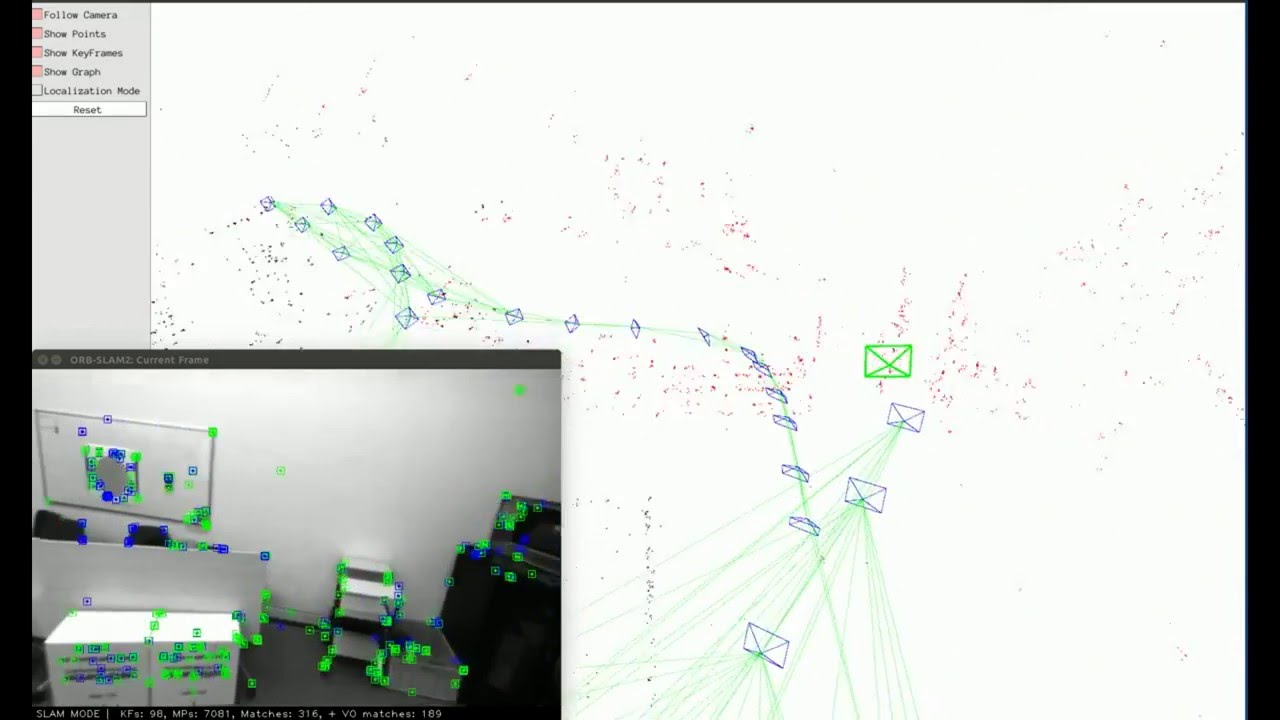
Stereo ORB-SLAM (ORB-SLAM2) in the EuRoC MAV Dataset (V1_02 and V1_03)
Автор: Raúl Mur Artal
Загружено: 2016-03-09
Просмотров: 7788
Описание:
We build a map with sequence V1_02_medium. We then disable mapping (Localization mode) and use the map to localize the MAV in sequence V1_03_difficult. Please select at least 720p quality!
Code & Info: https://github.com/raulmur/ORB_SLAM2
Authors: Raúl Mur-Artal, Juan D. Tardós, J. M . M. Montiel and Dorian Gálvez-López (DBoW2). Universidad de Zaragoza
EuRoC Dataset (M. Burri, J. Nikolic, P. Gohl, T. Schneider, J. Rehder, S. Omari, M. Achtelik and R. Siegwart):http://projects.asl.ethz.ch/datasets/...
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Доступные форматы для скачивания:
Скачать видео
-
Информация по загрузке:



















