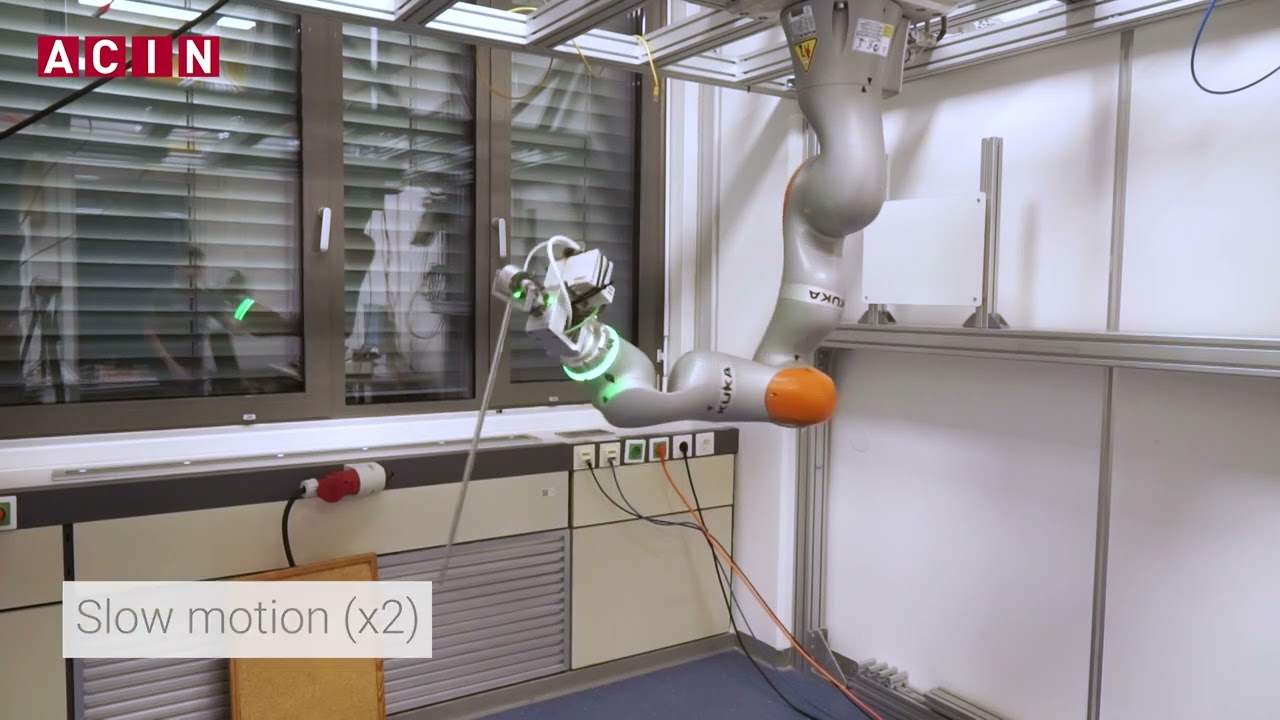
Fast Swing-Up Trajectory Optimization for a Spherical Pendulum on a 7-DoF Collaborative Robot
Автор: Automation and Control Institute - TU Wien
Загружено: 2023-04-27
Просмотров: 830
Описание:
In this video, the experimental swing-up of a spherical pendulum mounted on a collaborative robot is presented. The primary focus of this work is the design of a fast trajectory planning for the swing-up by systematically incorporating the kinematic and dynamics constraints. The proposed algorithm consists of a planning and a replanning step. The latter has an average computing time of 0.2 s. Simulations and experimental results demonstrate the swing-up of the spherical pendulum using a discrete time-variant linear quadratic regulator as a feedback controller.
Publication:
https://doi.org/10.1109/ICRA48506.202...
Authors:
Min Nhat Vu, https://orcid.org/0000-0003-0692-8830
Christian Hartl-Nesic, https://orcid.org/0000-0003-3054-9435
Andreas Kugi, https://orcid.org/0000-0001-7995-1690
Industrial Robotics, ACIN, TU Wien
https://www.acin.tuwien.ac.at/industr...
/ automation-and-control-institute-acin-tu-wien
Повторяем попытку...
Доступные форматы для скачивания:
Скачать видео
-
Информация по загрузке:












![Double Pendulum (C69) [3A95.50]](https://imager.clipsaver.ru/czLIj-4suOk/max.jpg)



