How engineers play darts: A cable-driven dart robot
Автор: Automation and Control Institute - TU Wien
Загружено: 2022-11-18
Просмотров: 23871
Описание:
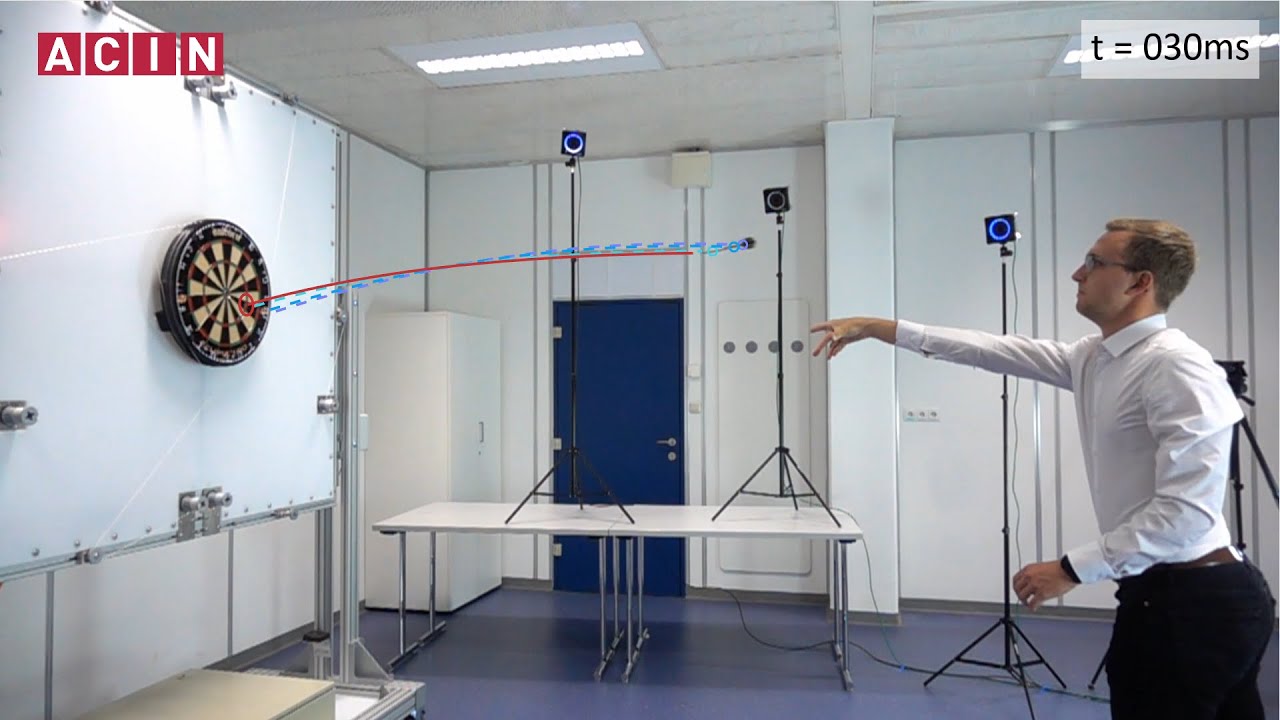
The idea is simple: Throw a dart in the direction of the dartboard and the board will move automatically to hit the desired field.
A novel type of cable-driven robot is able to quickly and precisely move the tournament dartboard. Cables are wound in grooves around a regular tournament dartboard enabling not only displacement, but also arbitrary rotational movement. The position of the steel dart is measured by an infrared camera system. An extended Kalman filter is used to track the flight trajectory and predict the impact point of the dart. Finally, the dartboard is moved such that the dart hits the desired position. Here,
model- and measurement based control, including a nonlinear cable force balancing algorithm are employed.
The robot was built using standard industrial components and custom designed 3D printed parts. The robot is used as a proof-of-concept for the developed robot type and to win any friday night darts contest. The developed technology has a wide field of applications e.g. camera motion control systems, storage and retrieval systems, simulators, and exoskeletons.
TU Wien ACIN CDS http://www.acin.tuwien.ac.at/
00:00 - Robot introduction
00:21 - Object following
00:50 - Automatic bullseye
01:11 - Tripe 20: 15 hits in a row
Publications:
Feiler, G., Schwegel, M., Knechtelsdorfer, U., & Kugi, A. (2022). Design and analysis of a class of planar cable-driven parallel robots with arbitrary rotation. IFAC-PapersOnLine, 55(27), 82-88.
Tackling the dart catching problem drew inspiration from Mark Rober's video "Automatic Bullseye Dartboard".
( • Automatic Bullseye, MOVING Dartboard )
Повторяем попытку...
Доступные форматы для скачивания:
Скачать видео
-
Информация по загрузке: