Балансирующий робот и ПИД / Balancing robot and the PID
Автор: Mikhail Momot
Загружено: 2017-06-18
Просмотров: 21996
Описание:
Это третий ролик из серии "балансирующие роботы"
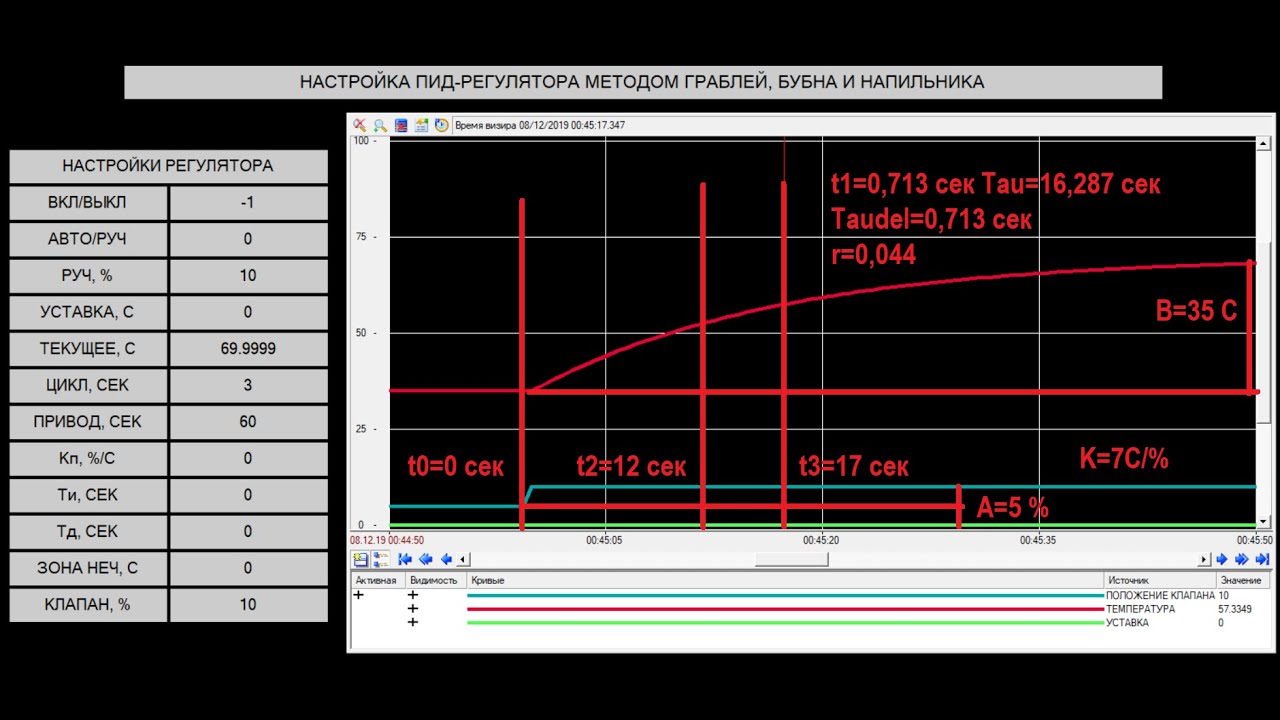
В нем рассматривается возможность использования ПИД - регулятора при наличии только одного датчика (два в одном), а именно MPU-6050. Также рассматривается возможность динамического изменения центра масс балансирующего робота с использованием дополнительных обратных связей.
Ссылка на программный код из ролика:
https://yadi.sk/d/zG8Cg-2Y3KEJwW
Программа управления по BT c Google Play: https://play.google.com/store/apps/de...
Новые материалы по данной теме:
• Самобалансирующий робот толстячок
• Selfbalancing робот Толстячок - изменения ...
• Самобалансирующий робот на Nano и MPU6050
• Selfbalancing bot (esp32) - part 2
https://zizibot.ru/articles/programmi...
https://zizibot.ru/articles/programmi...
Повторяем попытку...

Доступные форматы для скачивания:
Скачать видео
-
Информация по загрузке:




![Балансирующий робот | esp8266 | [Проект №1]](https://imager.clipsaver.ru/ZRSPSNteWiU/max.jpg)