Diffbot #14 ROS Navigation Stack in Gazebo Turtlebot3 World
Автор: Franz Pucher
Загружено: 2020-11-16
Просмотров: 598
Описание:
Source code is hosted on Github: https://github.com/fjp/diffbot
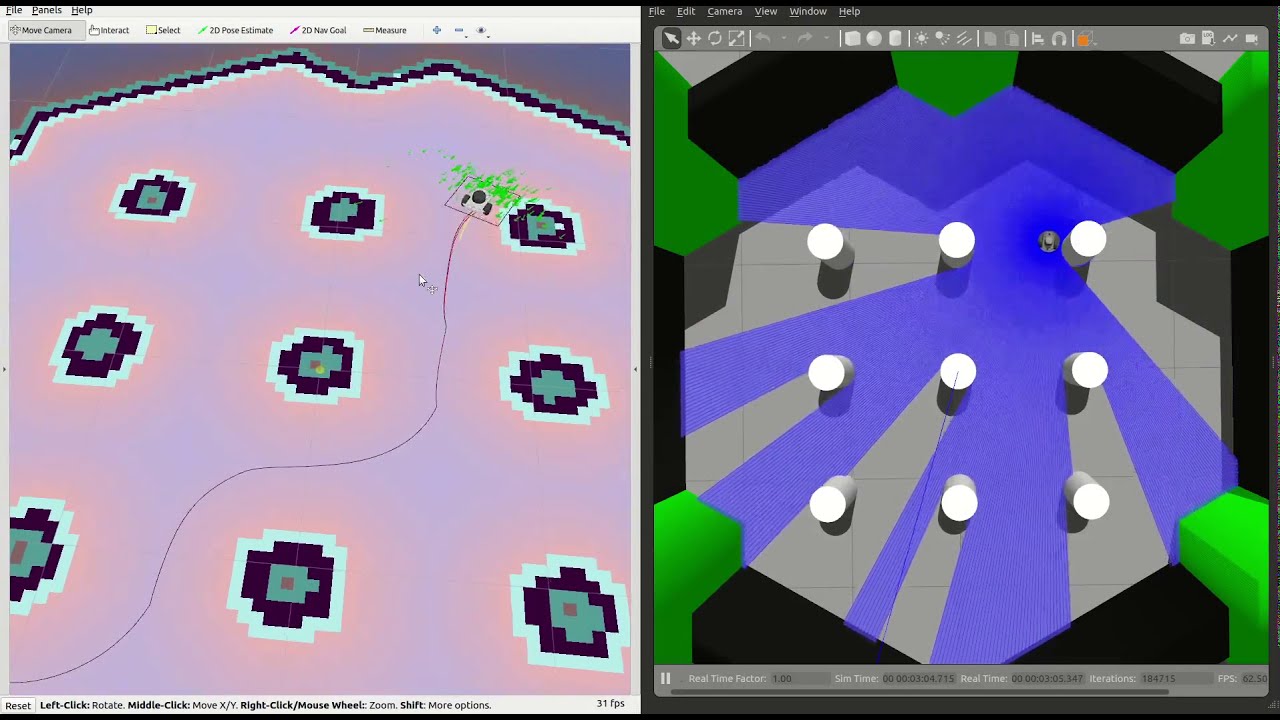
The video shows DiffBot in Gazebo with a simulated RPLidar A2 running the gazebo_ros_control plugin with diff_drive_controller from ROS Control and the packages form the ROS Navigation Stack. The robot model has a rear caster wheel and the PID values of Gazebo are not tuned. The mesh files are from https://grabcad.com/ and edited with https://www.onshape.com/ and https://www.blender.org/. All mesh files are stored in stl format in the DiffBot Github repository (see link below) in the diffbot_description/meshes.
DiffBot is an autonomous differential drive robot with two wheels. Its main processing unit is a Raspberry Pi 4 B running Ubuntu Mate 20.04 and the ROS 1 (ROS Noetic) middleware. Documentation can be found at: https://fjp.at/projects/diffbot/
Source code including stl mesh files is hosted on Github: https://github.com/fjp/diffbot
#ROS #navigation #DiffBot #Differential #Drive #RPLidar #Gazebo #RViz #ROS_Control #Noetic
Повторяем попытку...
Доступные форматы для скачивания:
Скачать видео
-
Информация по загрузке: