RI Seminar: Byron Boots : Machine Learning and Model Predictive Control for Adaptive Robotic Systems
Автор: CMU Robotics Institute
Загружено: 2022-11-19
Просмотров: 4351
Описание:
https://www.ri.cmu.edu/event/machine-...
Byron Boots
Amazon Professor
Machine Learning in the Paul G. Allen School of Computer Science, University of Washington
November 18, 2022
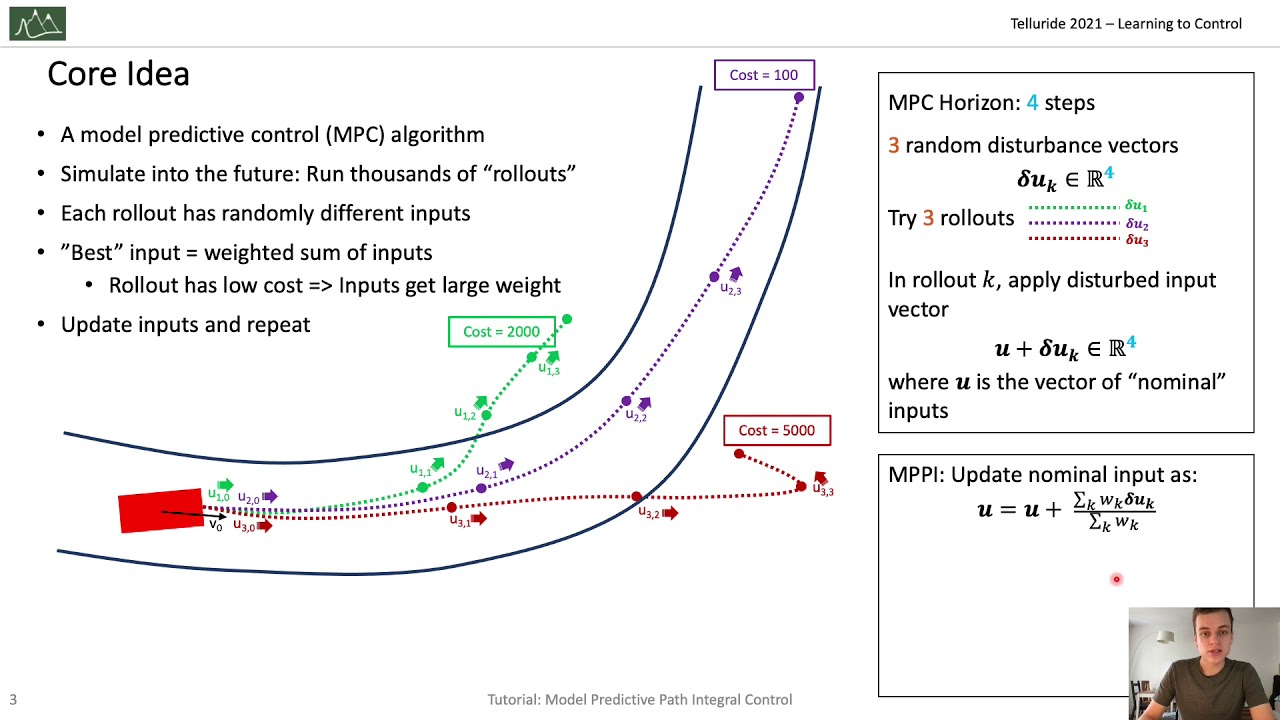
Abstract: In this talk I will discuss several different ways in which ideas from machine learning and model predictive control (MPC) can be combined to build intelligent, adaptive robotic systems. I’ll begin by showing how to learn models for MPC that perform well on a given control task. Next, I’ll introduce an online learning perspective on MPC that unifies well-known algorithms and provides a prescriptive way to generate new ones. Finally, I will discuss how MPC can be combined with model-free reinforcement learning to build fast, reactive systems that can improve their performance with experience. Along the way, I’ll show how these approaches can be applied to the development of high-speed ground vehicles.
Bio: Byron Boots is the Amazon Professor of Machine Learning in the Paul G. Allen School of Computer Science and Engineering at the University of Washington. Byron’s group performs fundamental and applied research in machine learning, artificial intelligence, and robotics with a focus on developing theory and systems that tightly integrate perception, learning, and control. His work has been applied to a range of problems including localization and mapping, motion planning, robotic manipulation, quadrupedal locomotion, and high-speed navigation. Byron has received several awards including “Best Paper” Awards from ICML, AISTATS, RSS, and IJRR. He is also the recipient of the RSS Early Career Award, the DARPA Young Faculty Award, the NSF CAREER Award, and the Outstanding Junior Faculty Research Award from the College of Computing at Georgia Tech. Byron received his PhD from the Machine Learning Department at Carnegie Mellon University.
Повторяем попытку...

Доступные форматы для скачивания:
Скачать видео
-
Информация по загрузке: