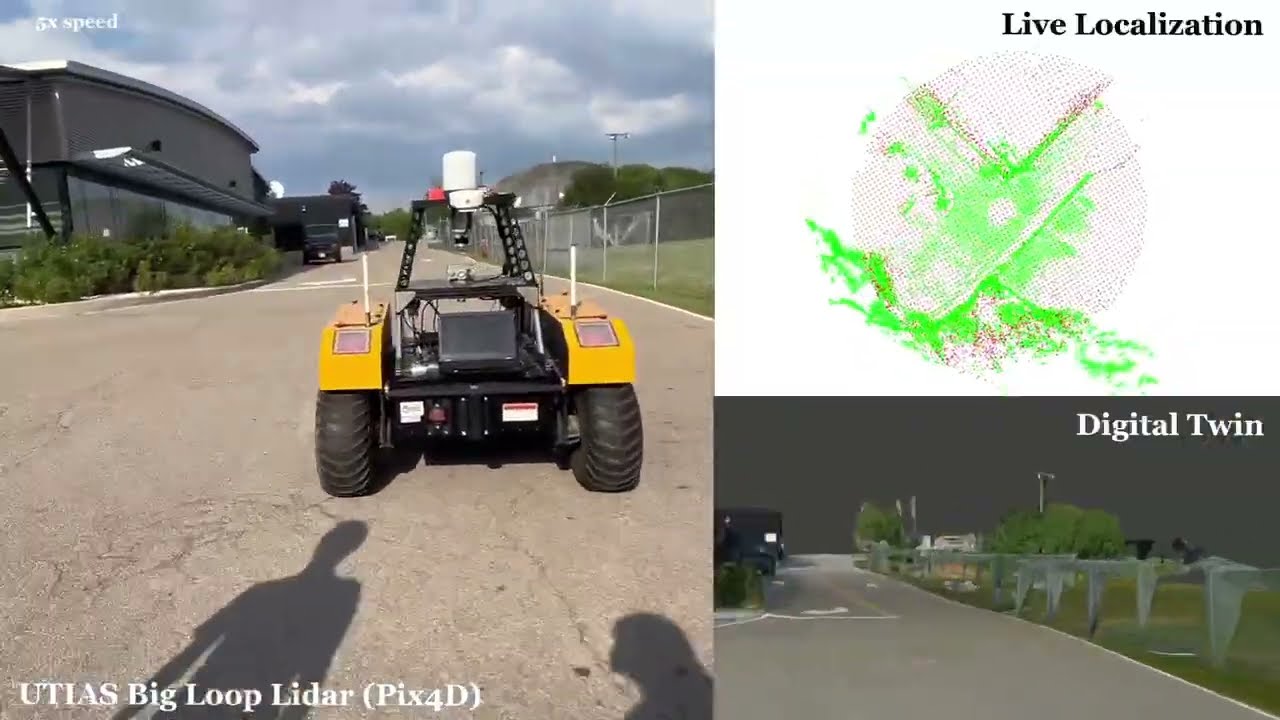
Visual Teach and Repeat, Repeat, Repeat @ UTIAS (IROS 2013)
Автор: utiasASRL
Загружено: 2013-11-20
Просмотров: 1382
Описание:
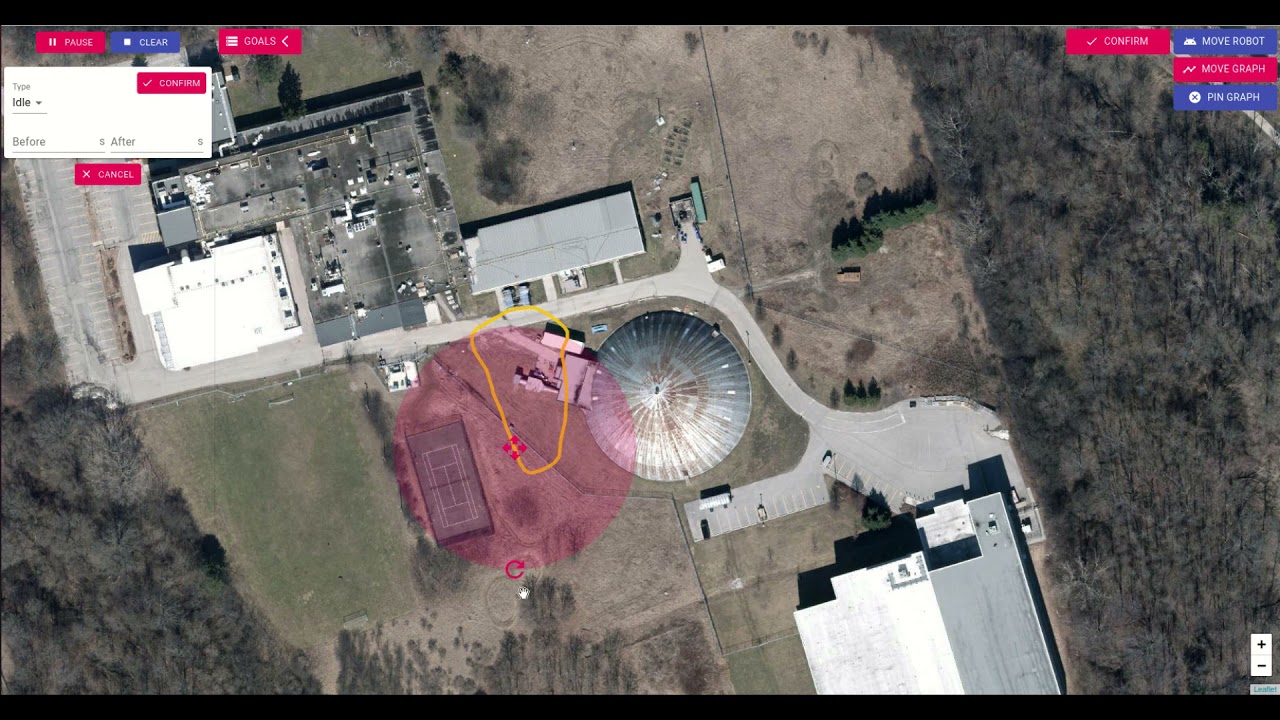
This video shows our classic stereo visual teach and repeat algorithm with a new learning feature enabled. The path-tracking controller gathers experience from multiple runs and learns how to correct any systematic errors it can measure, regardless of the nature of the causes. This allows the robot to compensate for such effects as crosshill gravity or unmodelled vehicle dynamics.
This video is associated with the following paper:
Ostafew C J, Schoellig A P, and Barfoot T D. "Visual Teach and Repeat, Repeat, Repeat: Iterative Learning Control to Improve Mobile Robot Path Tracking in Challenging Outdoor Environments". In IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pages 176--181. Tokyo, Japan, 3-7 November 2013.
http://asrl.utias.utoronto.ca/~tdb/sb...
Повторяем попытку...

Доступные форматы для скачивания:
Скачать видео
-
Информация по загрузке:















![[4K FULL HD] Relaxing Water Background | 1 HOUR | Calm Water Wallpaper (No Sound)](https://imager.clipsaver.ru/y9PTNTSpGJs/max.jpg)