Видео с ютуба Robotpolicy

Эп. #86: RISE: самосовершенствующаяся робототехническая стратегия с композиционной моделью мира
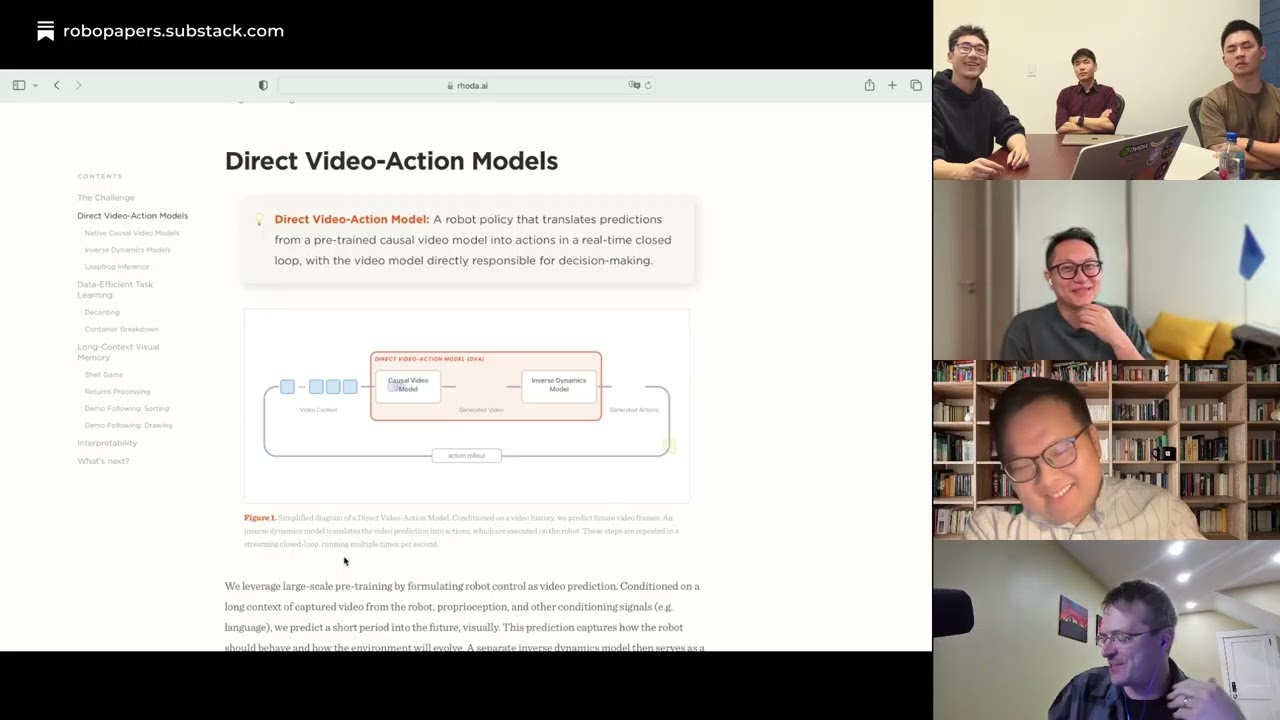
Эпизод 79: Rhoda AI — Причинно-следственные видеомодели — эффективные с точки зрения данных робот...
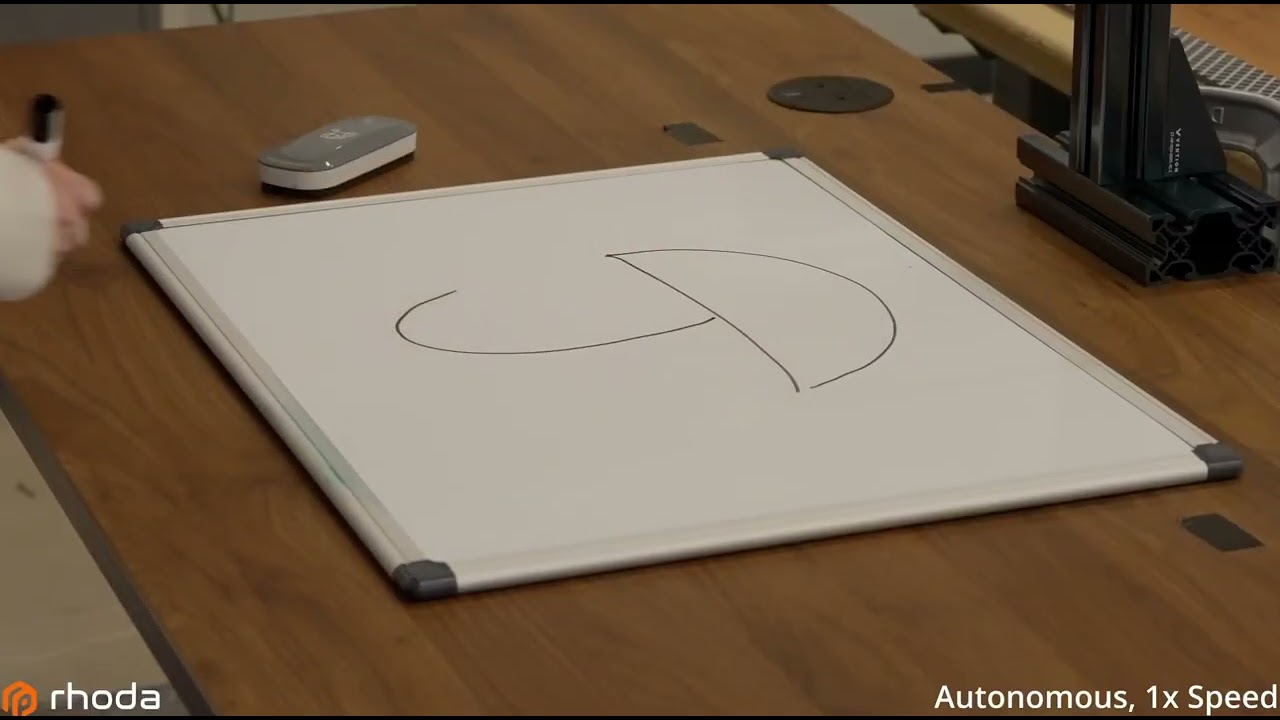
Causal Video Models Are Data Efficient Robot Policy Learners

Octo: политика в отношении роботов общего назначения с открытым исходным кодом

Reinforcement Learning behind Humanoid Robot Explained

SC3-Eval: Self-Consistent Video Generation for Robot Policy Evaluation

Robocar POLI Special | Rules of the Road | S1, S2, Safety Series|Cartoon for Kids | Robocar POLI TV
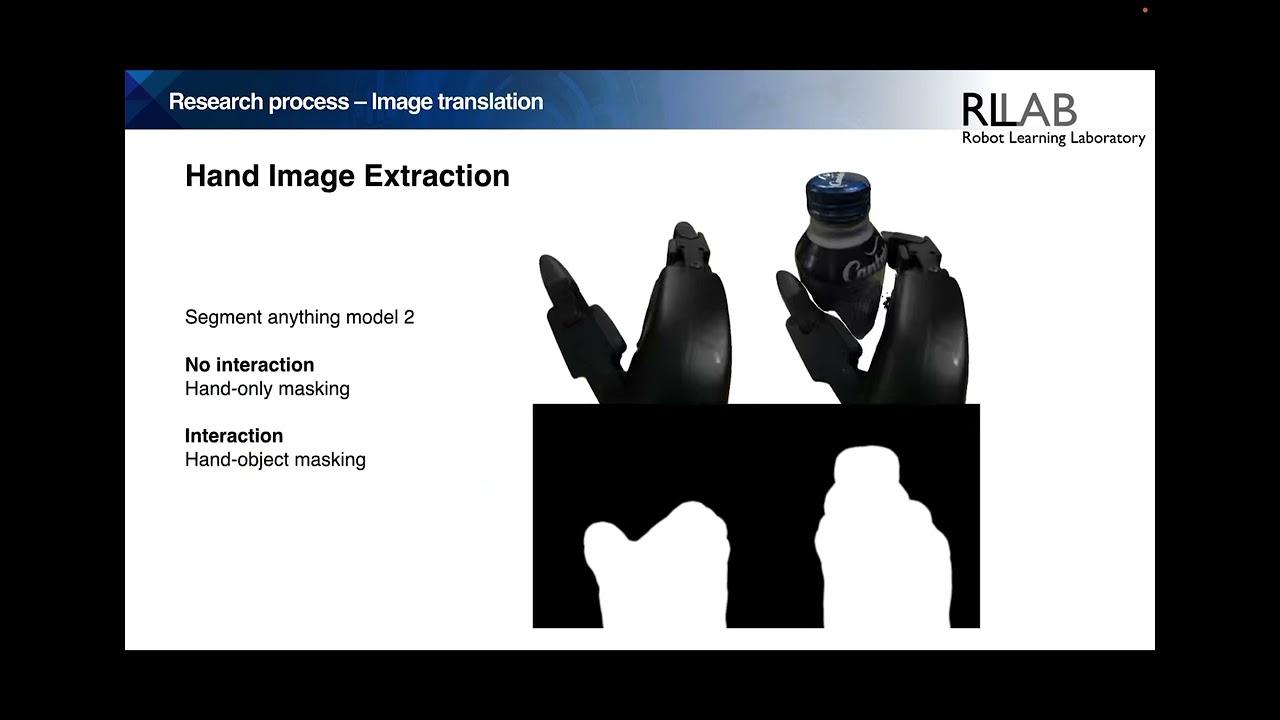
Generative Data Augmentation from Human Hand Demonstration for Robot Policy Learning

Stanford Seminar - Evaluating and Improving Steerability of Generalist Robot Policies

The Unreasonable Effectiveness of Discrete-Time Gaussian Process Mixture for Robot Policy Learning
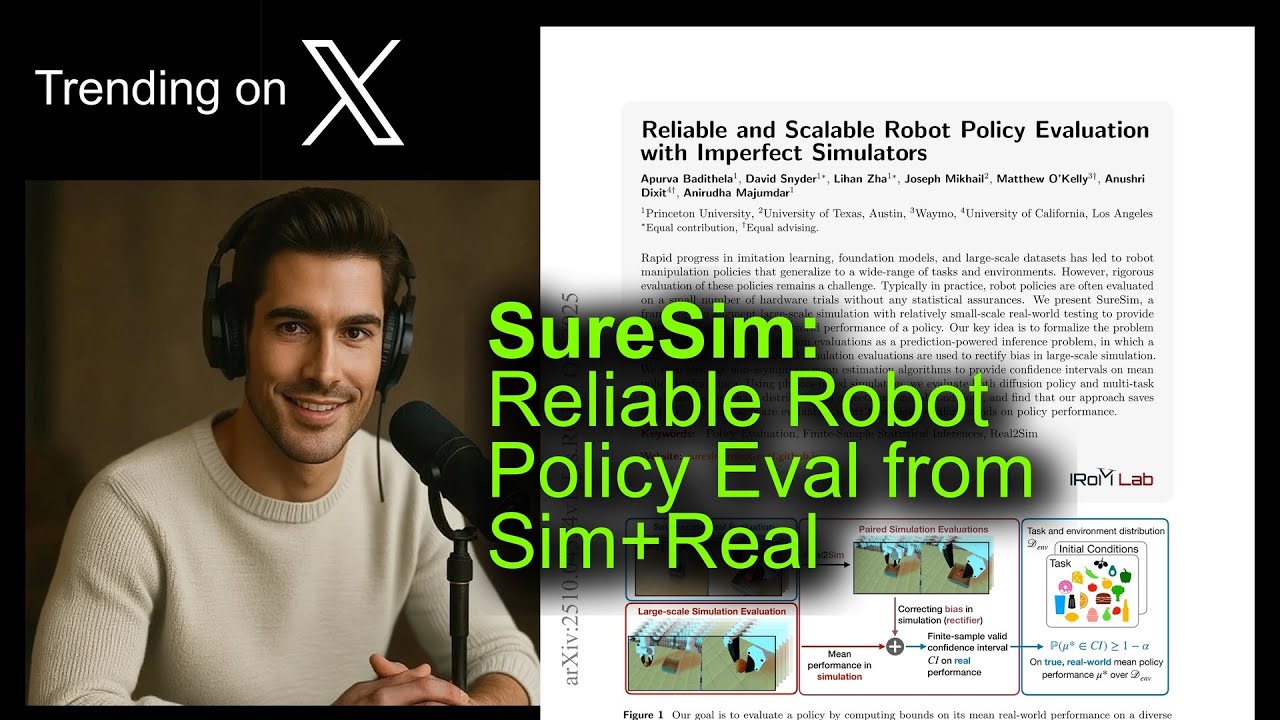
SureSim: Reliable Robot Policy Eval from Sim+Real
![[6/20 06:00] ENPIRE robot policy self-improvement / Safety-aligned models and mixed compliance](https://imager.clipsaver.ru/l8aqmSdxtgo/max.jpg)
[6/20 06:00] ENPIRE robot policy self-improvement / Safety-aligned models and mixed compliance
![[CVPR 2026] GraspLDP: Towards Generalizable Grasping Policy via Latent Diffusion](https://imager.clipsaver.ru/ffcUxVQwcMc/max.jpg)
[CVPR 2026] GraspLDP: Towards Generalizable Grasping Policy via Latent Diffusion

Trump administration looks to supercharge robotics industry, Politico reports

Геометрическая модель действий для обучения стратегий роботов (июнь 2026 г.)