Видео с ютуба Robotpolicy

Эп. #86: RISE: самосовершенствующаяся робототехническая стратегия с композиционной моделью мира
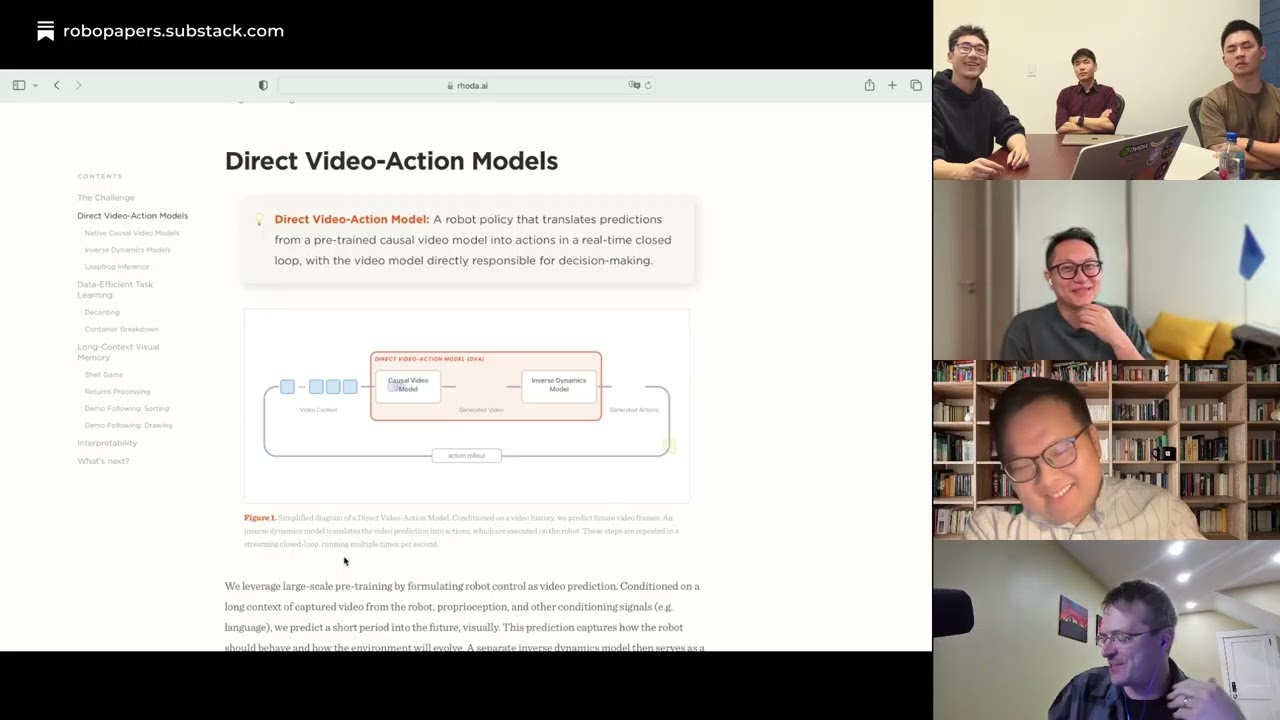
Эпизод 79: Rhoda AI — Причинно-следственные видеомодели — эффективные с точки зрения данных робот...
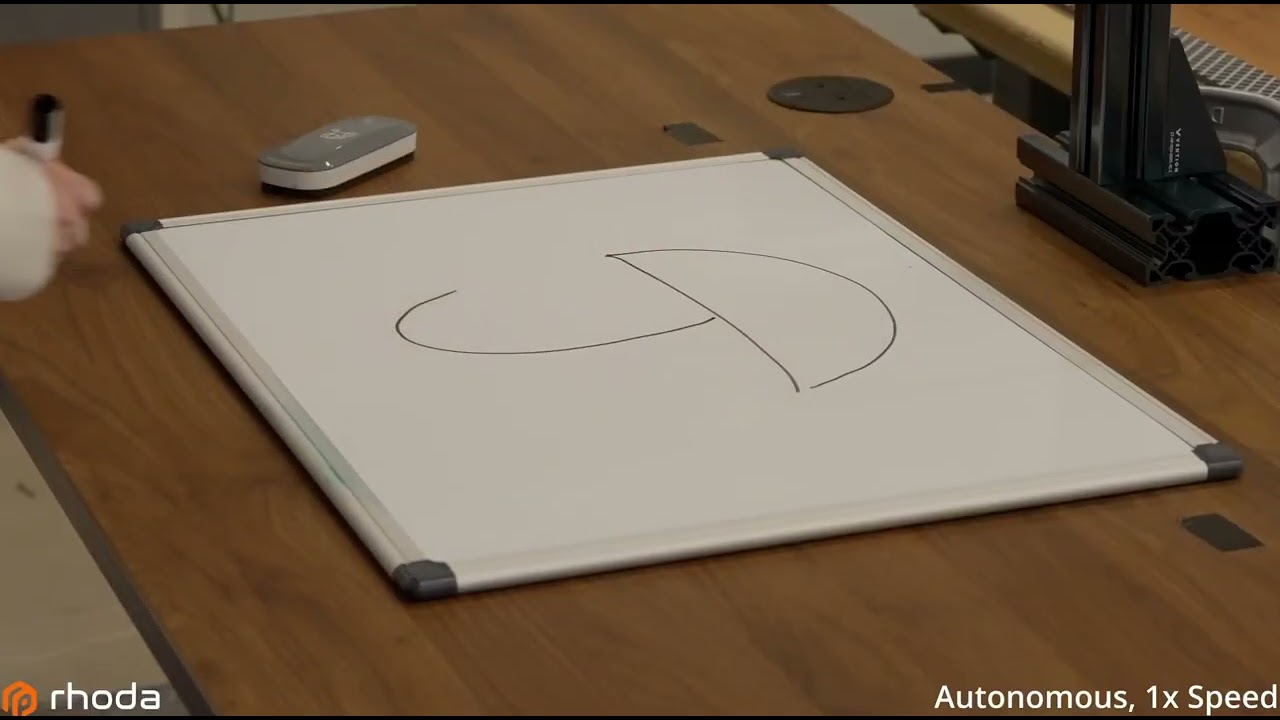
Causal Video Models Are Data Efficient Robot Policy Learners

Reinforcement Learning behind Humanoid Robot Explained

Геометрическая модель действий для обучения стратегий роботов (июнь 2026 г.)

Robocar POLI Special | Rules of the Road | S1, S2, Safety Series|Cartoon for Kids | Robocar POLI TV
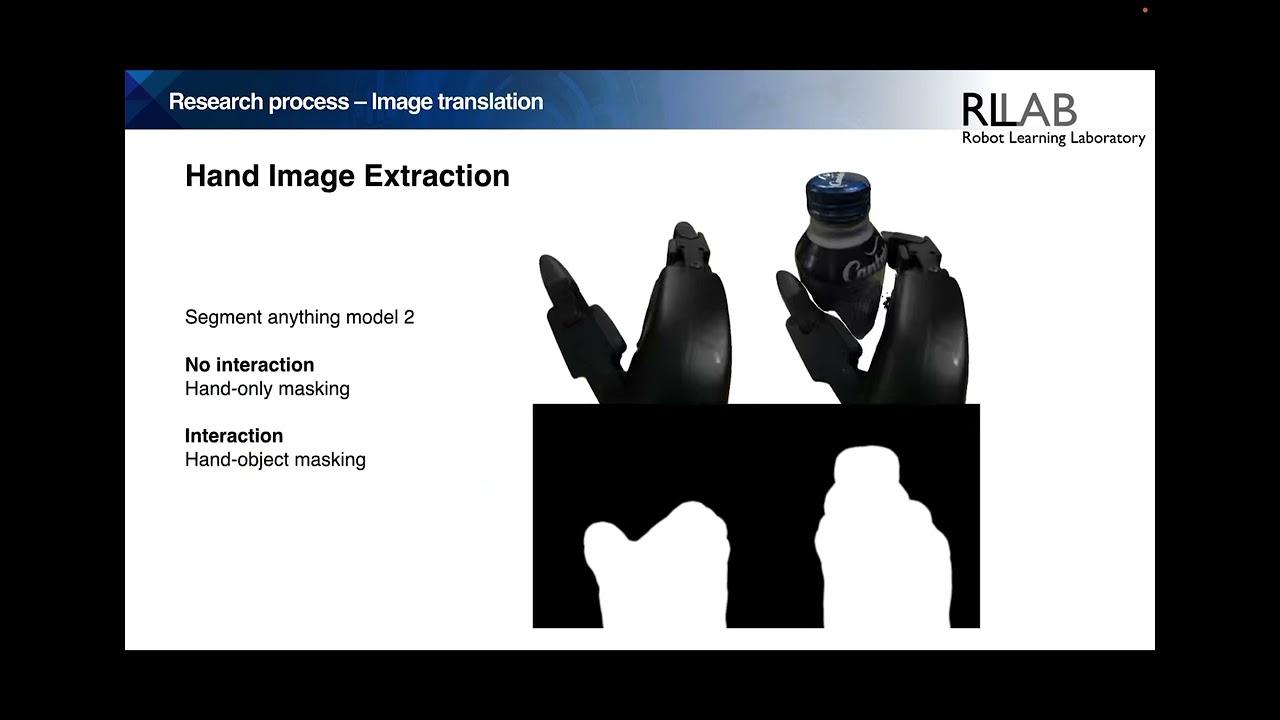
Generative Data Augmentation from Human Hand Demonstration for Robot Policy Learning
![[6/20 06:00] ENPIRE robot policy self-improvement / Safety-aligned models and mixed compliance](https://imager.clipsaver.ru/l8aqmSdxtgo/max.jpg)
[6/20 06:00] ENPIRE robot policy self-improvement / Safety-aligned models and mixed compliance
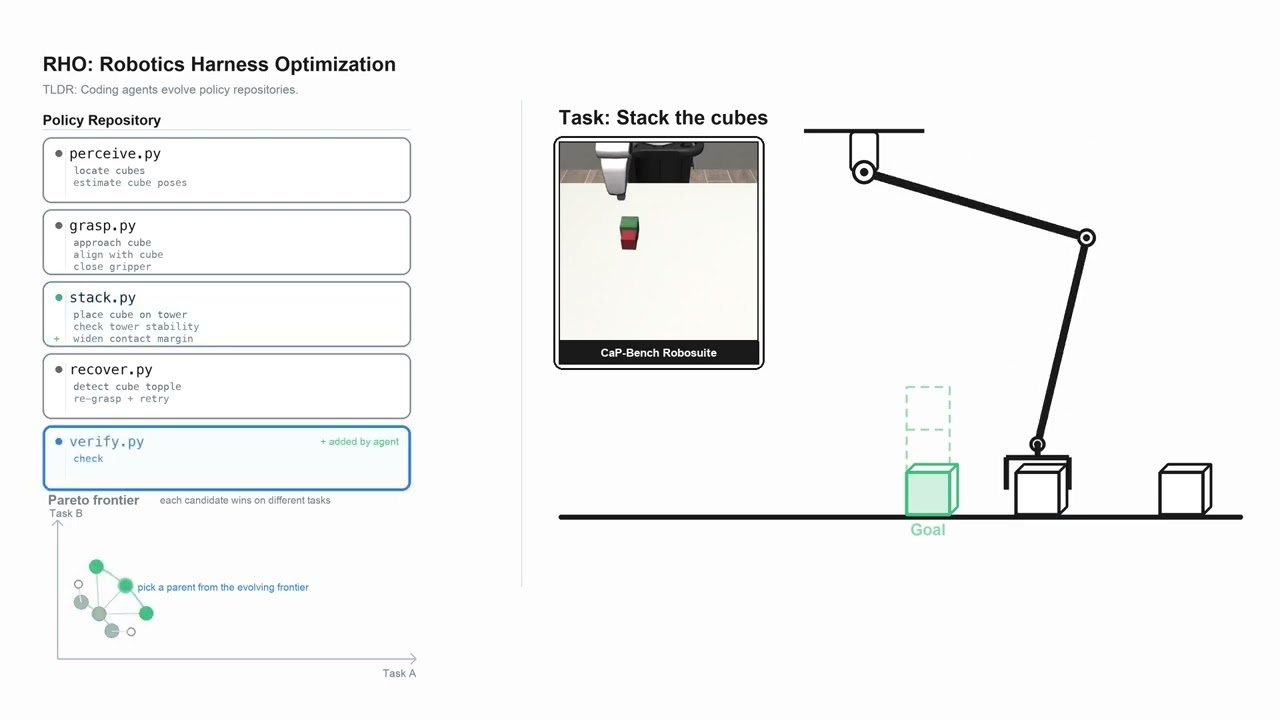
Your Coding Agent is Secretly a Roboticist (RHO, Robotics Harness Optimization)

Octo: политика в отношении роботов общего назначения с открытым исходным кодом

The Unreasonable Effectiveness of Discrete-Time Gaussian Process Mixture for Robot Policy Learning

Trump administration looks to supercharge robotics industry, Politico reports
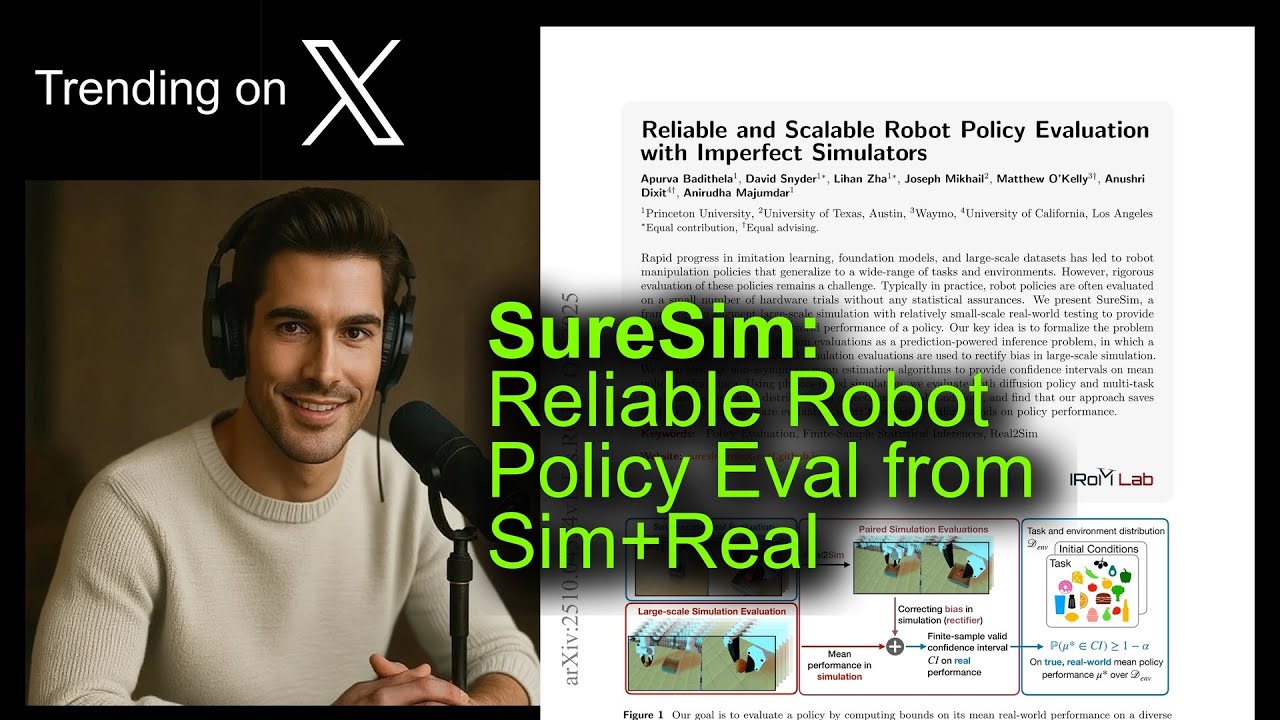
SureSim: Reliable Robot Policy Eval from Sim+Real
![[CVPR 2026] GraspLDP: Towards Generalizable Grasping Policy via Latent Diffusion](https://imager.clipsaver.ru/ffcUxVQwcMc/max.jpg)
[CVPR 2026] GraspLDP: Towards Generalizable Grasping Policy via Latent Diffusion

SC3-Eval: Self-Consistent Video Generation for Robot Policy Evaluation