Localization in an open-pit mine with Seyond Falcon LiDAR
Автор: Exwayz
Загружено: 2026-03-10
Просмотров: 23
Описание:
We were discussing with customers deploying trucks into an open-pit mines ⛏️. On paper, their localization architecture looked rock-solid (pun intended): RTK GNSS, LiDAR, IMU, multi-sensor fusion. The classic outdoor autonomy setup. But still, they struggle !
Mines tend to concentrate several localization edge cases in the same place:
Long haul roads with highly repetitive terrain that can trick visual perception 🏜️
Steep ramps and large elevation changes ⛰️
Rock walls causing GNSS multipath and degrading precision 🛰️
Dust clouds from heavy trucks that can blind perception for seconds 🌪️
When these effects add up, localization starts to struggle. Mining is actually a good example of a broader class of environments: large-scale, unstructured sites with dust, repetitive geometry, and intermittent or absent GNSS.
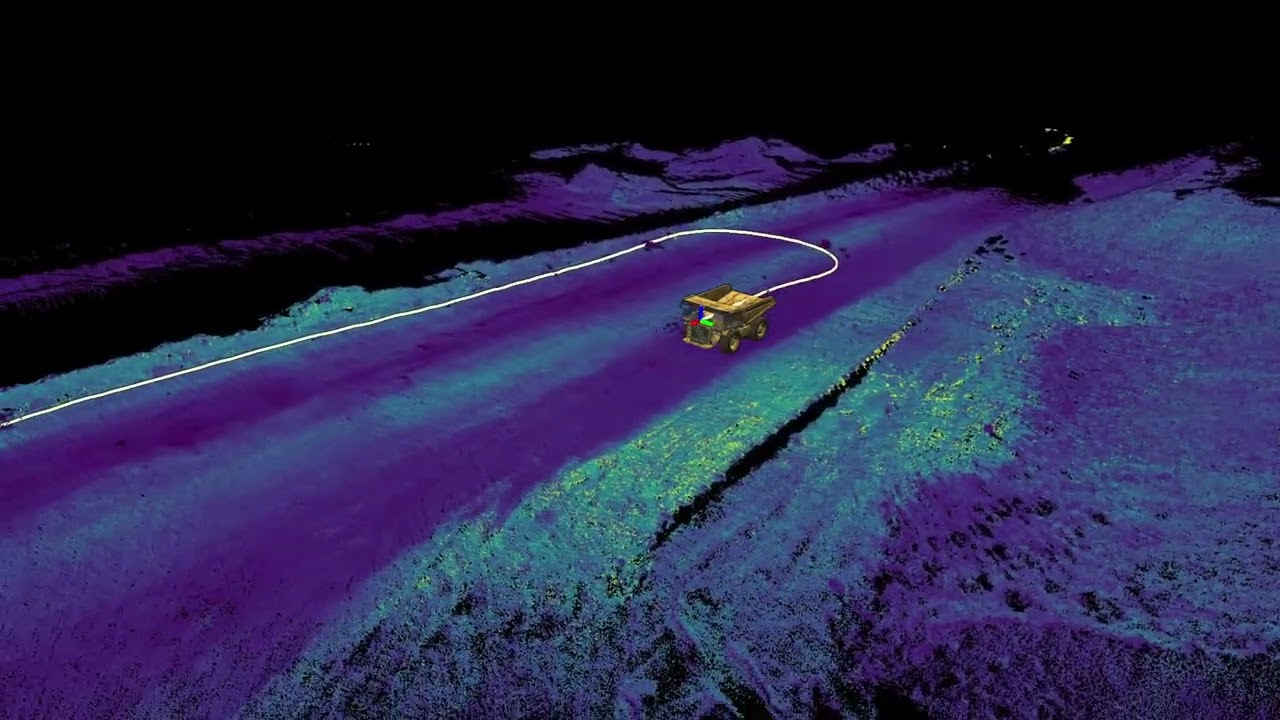
This is where map-based localization becomes powerful. Instead of relying on wheel odometry, visual texture, or satellite availability, the system anchors itself to the physical geometry of the site (rock faces, terrain relief, benches...). As long as the geometry exists and has been mapped, the localization reference remains.
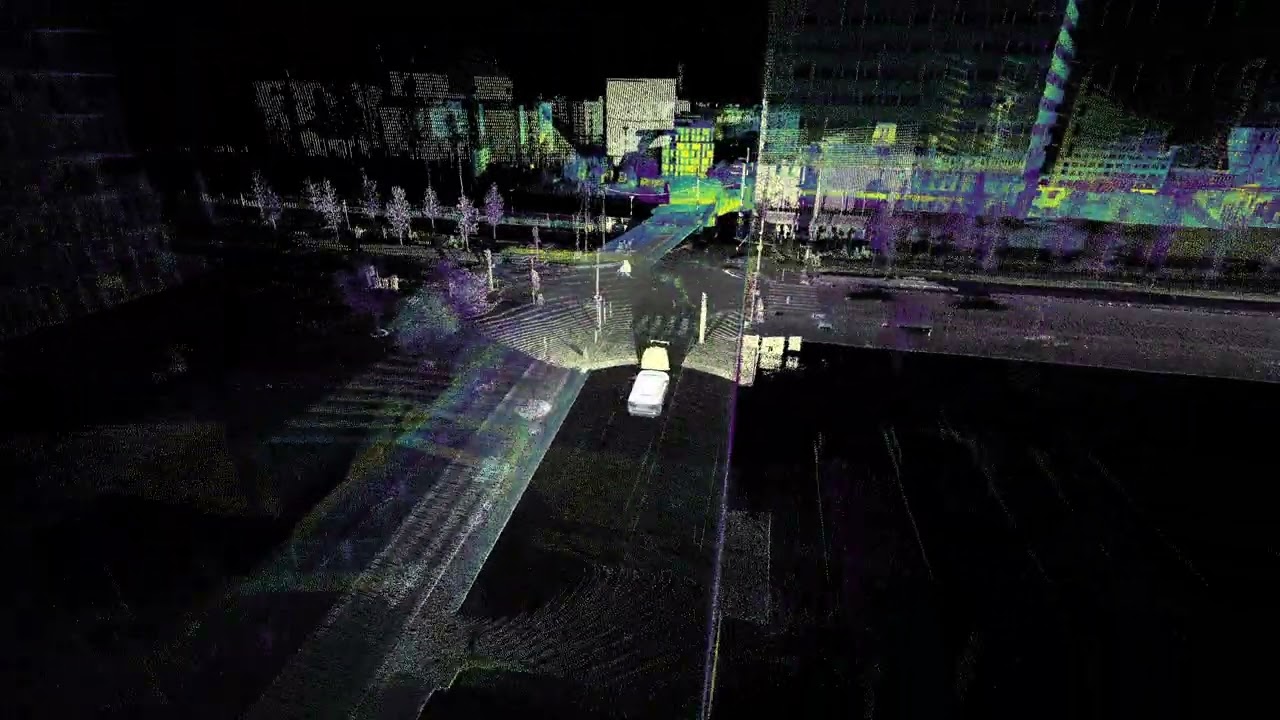
🎥 In this video, a mining truck uses Exwayz to position itself in a sparse open-pit environment. The vehicle is equipped with a long-range Seyond Falcon LiDAR, enabling reliable relocalization against a large-scale 3D map of the site 📍
This is what large-scale 3D mapping enables: reliable localization in environments where traditional signals and features become unreliable
👉 If you want to see how map-based localization can make your stack resilient in such conditions, contact us!
Повторяем попытку...
Доступные форматы для скачивания:
Скачать видео
-
Информация по загрузке: