Dynamic Walking - Online Gait Pattern Regeneration for Bipedal Robots
Автор: Robot Intelligence Lab
Загружено: 2018-11-11
Просмотров: 30544
Описание:
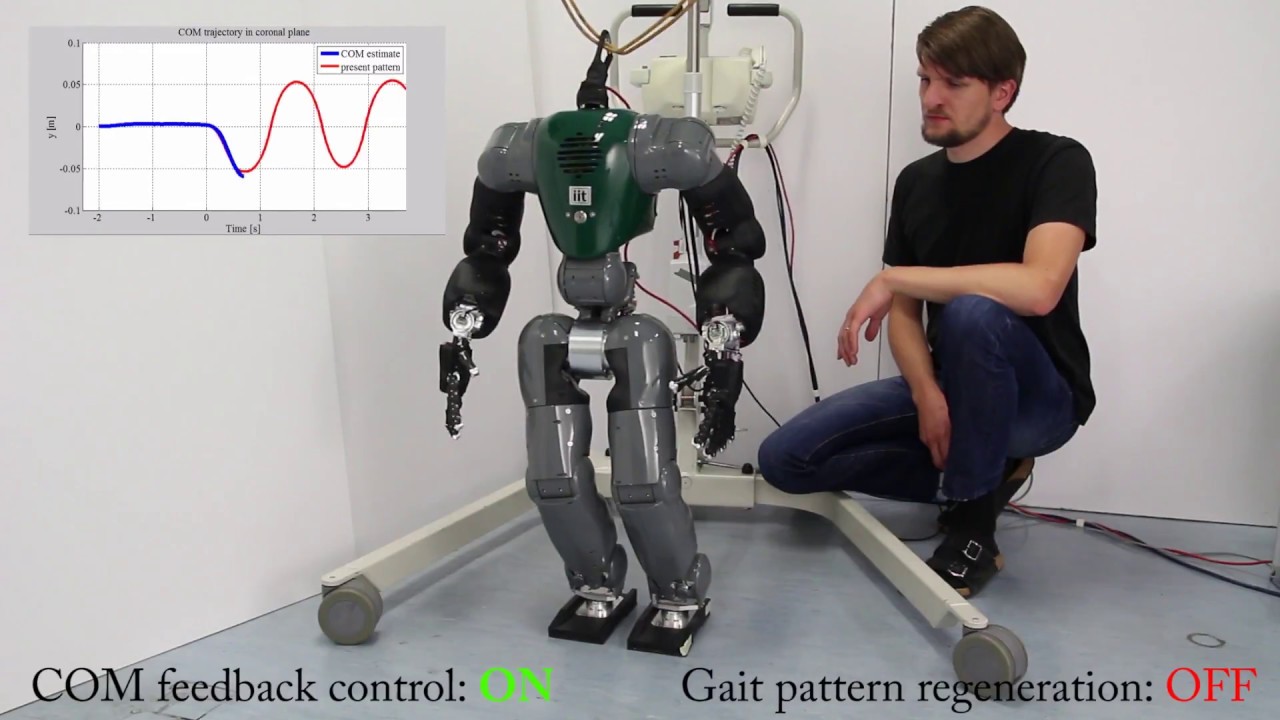
The video demonstrates a new algorithm capable of online regeneration of walking gait patterns for bipedal robots. The algorithm uses a nonlinear optimization technique to find step parameters that will bring the robot from the present state to a desired state. It modifies online not only the footstep positions, but also the step timing in order to maintain dynamic stability during walking.
Inclusion of step time modification extends the robustness against rarely addressed disturbances, such as pushes towards the stance foot. The controller is able to recover dynamic stability regardless of the source of the disturbance (e.g. model inaccuracy, reference tracking error or external disturbance).
The approach uses robot state estimation and center-of-mass feedback controller to realize stable locomotion on the passively-compliant humanoid robot COMAN. The results show that the robot is able to cope with series of pushes by adjusting both the step timing and the footstep positions.
Video credit: Przemyslaw Kryczka and Petar Kormushev
Dr Petar Kormushev is the Director of the Robot Intelligence Lab, Imperial College London
http://www.imperial.ac.uk/robot-intel...
Повторяем попытку...
Доступные форматы для скачивания:
Скачать видео
-
Информация по загрузке:



















