Скачать
RobotStudio Mechanism modelling and simulation
Автор: Gunnar Bolmsjö
Загружено: 2017-11-14
Просмотров: 14417
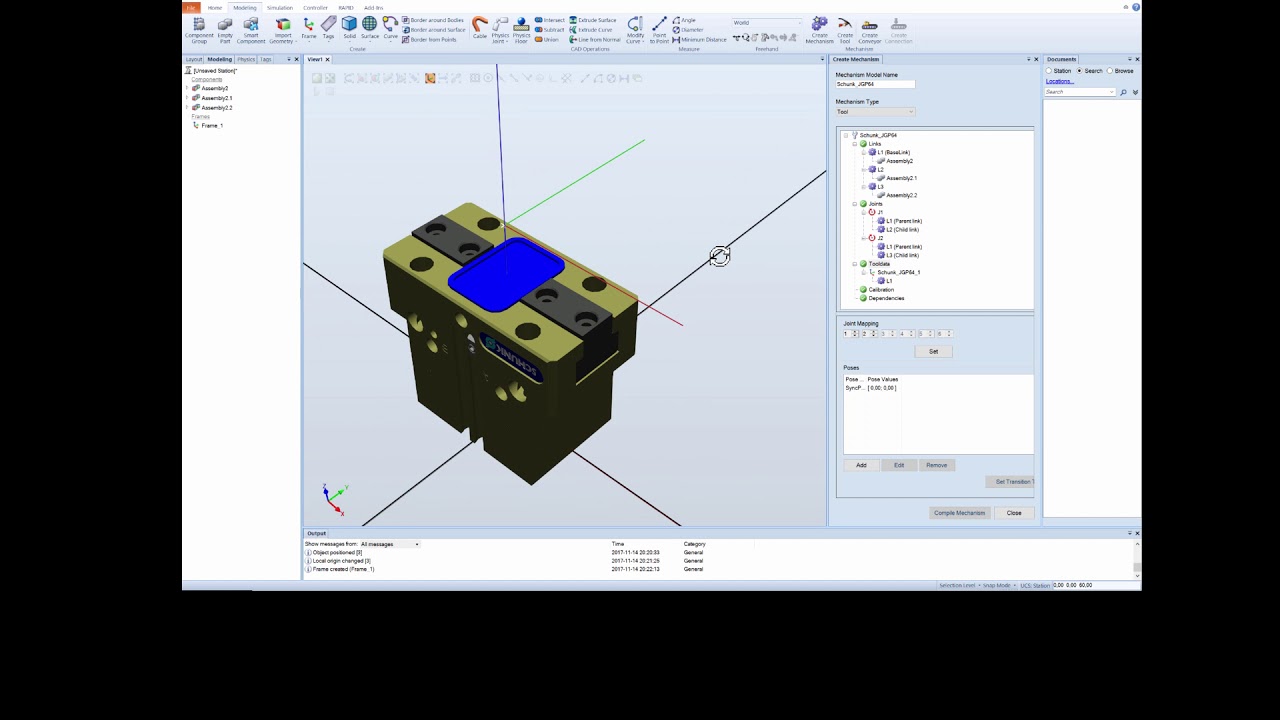
Описание: Defining Mechanism as robot tool. This tutorial shows how to model and define a gripper (Schunk) as a mechanism. The tool is further used in a short program describing how to use I/O and event manager in a simulation and generate a RAPID program
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Доступные форматы для скачивания:
Скачать видео
-
Информация по загрузке: