Salto-1P Leaping and Landing ICRA 2020 Presentation
Автор: BiomimeticMillisys
Загружено: 2020-06-01
Просмотров: 10233
Описание:
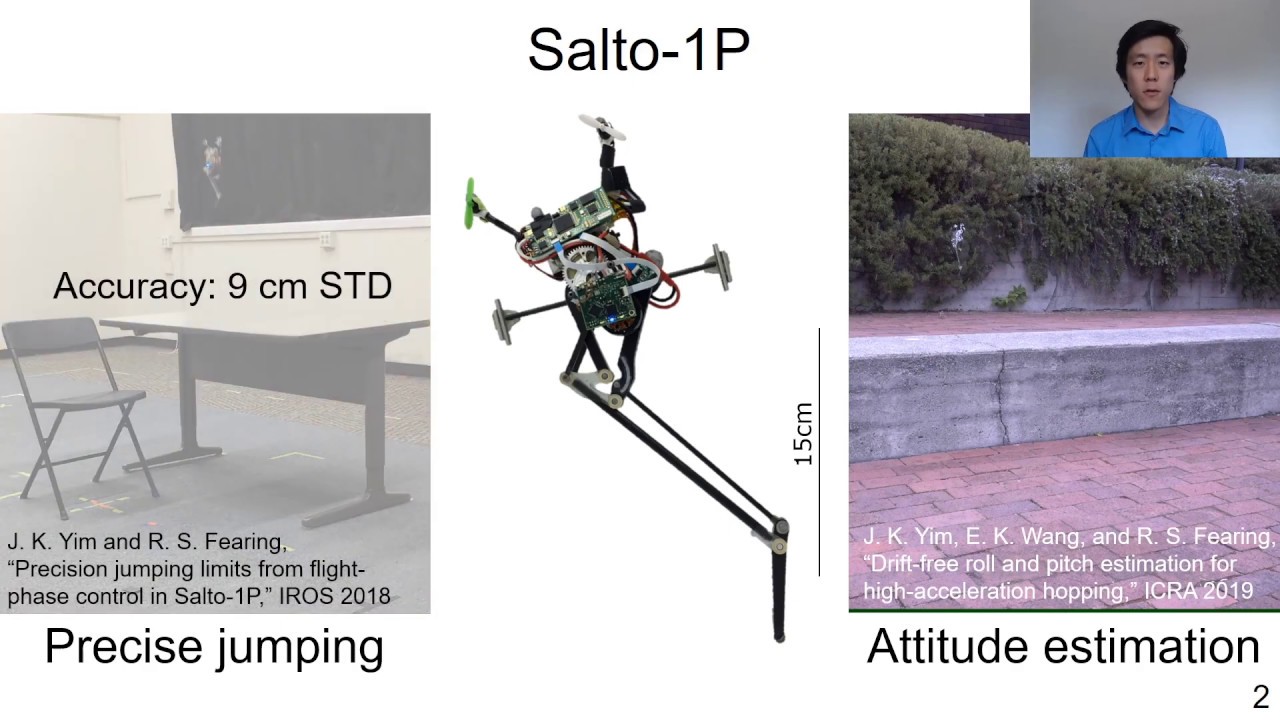
The small hopping robot Salto-1P can run and hop on furniture, but it couldn't hit a target smaller than a dinner plate or stop bouncing. With a new balancing control algorithm, Salto-1P can now jump to a narrow target and stick its landing like a gymnast.
This video is the presentation given for the 2020 IEEE International Conference on Robotics and Automation (ICRA).
This work was a collaboration between researchers at the University of California, Berkeley, and the Istituto Italiano di Tecnologia and is published in IEEE Robotics and Automation Letters, titled "Precision robotic leaping and landing using stance-phase balance", DOI: 10.1109/LRA.2020.2976597
Повторяем попытку...
Доступные форматы для скачивания:
Скачать видео
-
Информация по загрузке:



















