AvantSatie! Using ERIK to encode task-relevant expressivity in animation of autonomous social robots
Автор: Tiago Ribeiro
Загружено: 2025-12-11
Просмотров: 9
Описание:
Video companion for the paper:
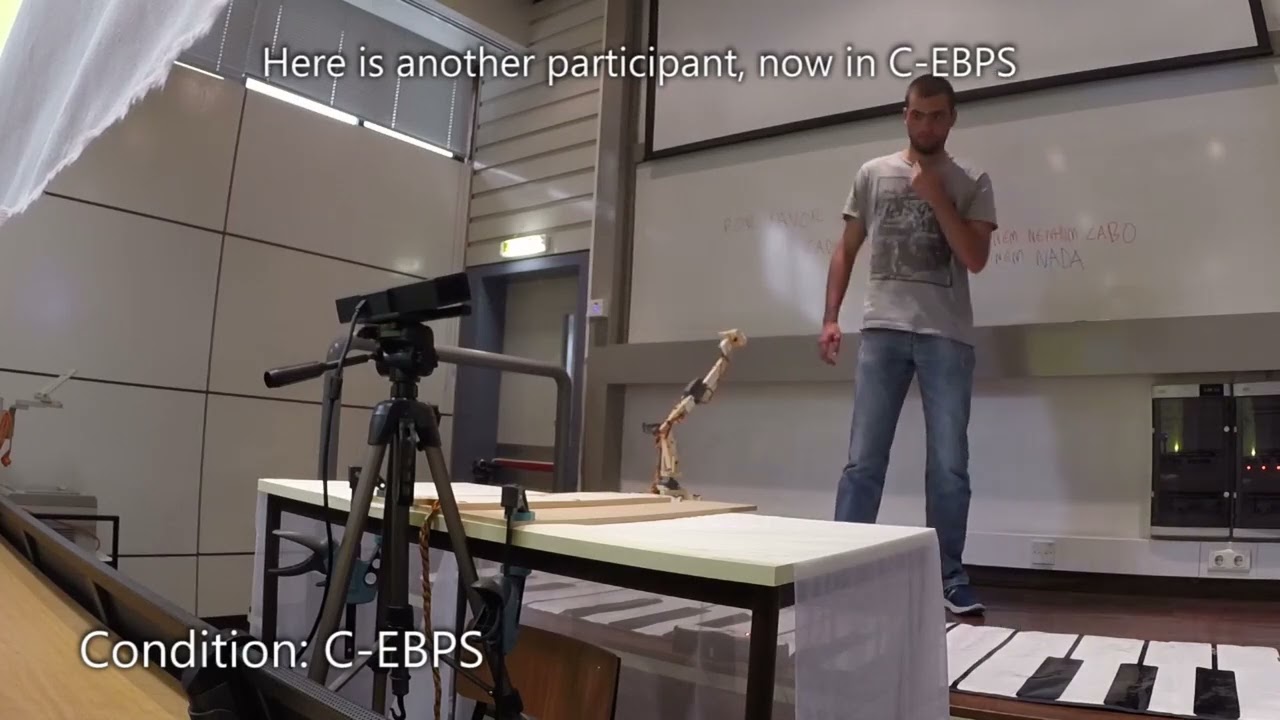
AvantSatie! Using ERIK to encode task-relevant expressivity into the animation of autonomous social robots
ABSTRACT
ERIK is an expressive inverse kinematics technique that has been previously presented and evaluated both algorithmically and in a limited user-interaction scenario. It allows autonomous social robots to convey posture-based expressive information while gaze-tracking users. We have developed a new scenario aimed at further validating some of the unsupported claims from the previous scenario. Our experiment features a fully autonomous Adelino robot, and concludes that ERIK can be used to direct a user’s choice of actions during execution of a given task, fully through its non-verbal expressive queues.
The paper can be accessed here:
https://www.tiagoribeiro.pt/publicati...
Повторяем попытку...
Доступные форматы для скачивания:
Скачать видео
-
Информация по загрузке:












![[4K FULL HD] Relaxing Water Background | 1 HOUR | Calm Water Wallpaper (No Sound)](https://imager.clipsaver.ru/y9PTNTSpGJs/max.jpg)