Скачать
How to Control an Inverted Pendulum on a Cart Using LQR in MATLAB
Автор: ABHISHEK SHARMA
Загружено: 2024-05-31
Просмотров: 119
Описание:
System Modeling:
Symbolic math to derive the cart-pendulum system, including deriving the equations of motion using Lagrangian mechanics.
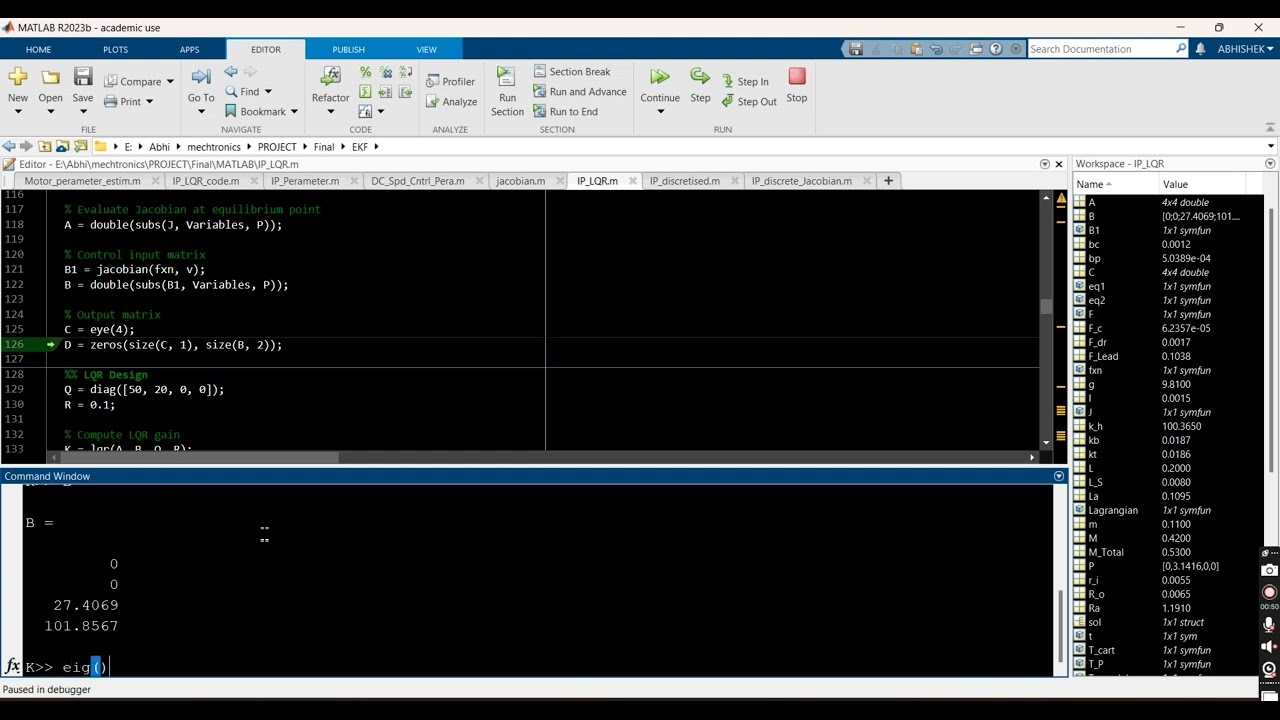
Linearization and LQR Design:
Linearizing the nonlinear system around its equilibrium point and designing an optimal LQR controller for stabilization.
Simulation and Visualization:
Implementing the control law in MATLAB, solving the differential equations, and visualizing the system's response with both plots and animation.
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Доступные форматы для скачивания:
Скачать видео
-
Информация по загрузке:
![Inverted Pendulum on a Cart [Control Bootcamp]](https://image.4k-video.ru/id-video/qjhAAQexzLg)

![[ENG] Aleksandra Głowacka | Allegro delivery: when product delivery becomes a challenge | WaysConf](https://image.4k-video.ru/id-video/PX-uxoXAaeo)