Скачать
(6C) Introduction à la robotique mobile : Transformations géométriques
Автор: Philippe Giguère
Загружено: 2022-08-31
Просмотров: 993
Описание:
Concept de référentiel (monde, caméra)
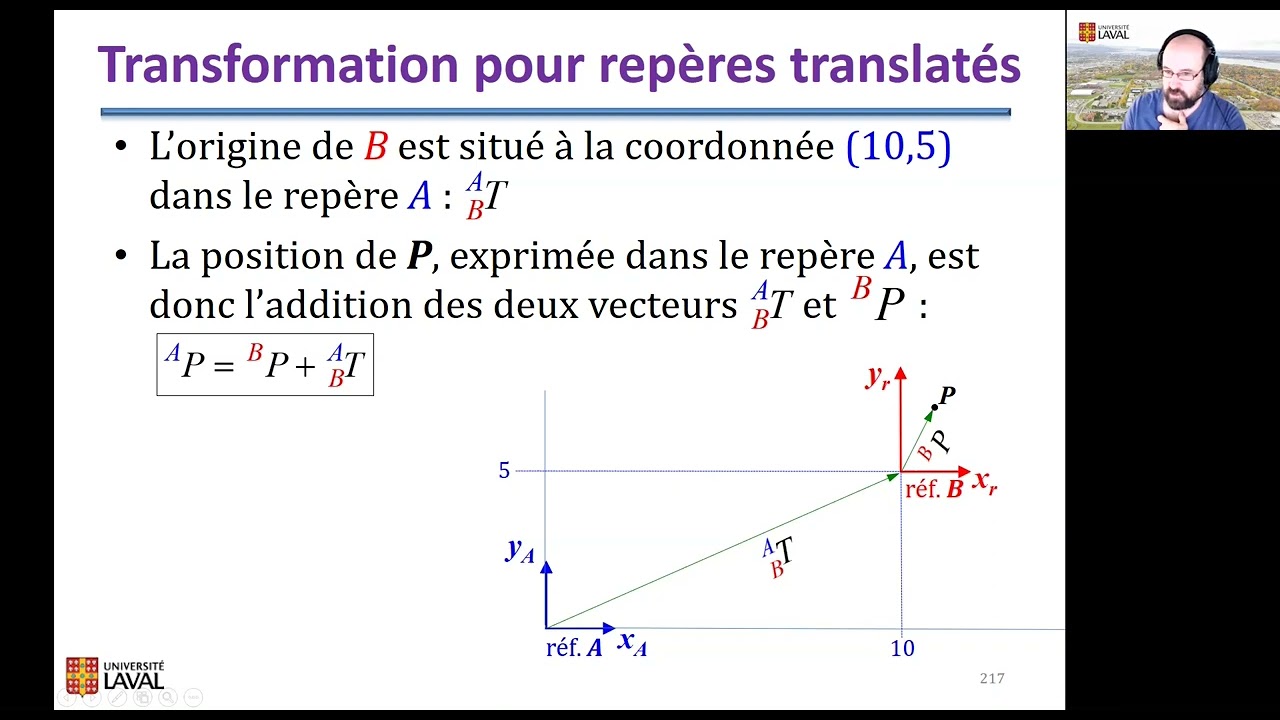
Translation
Rotation
Coordonnées homogènes dans les transformations géométriques
Transformation inverse
Exemple
Modèle de caméra complet : matrice intrinsèque et extrinsèque
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Доступные форматы для скачивания:
Скачать видео
-
Информация по загрузке:







![Как считали число пи? [Veritasium]](https://imager.clipsaver.ru/A3PL61fHzjs/max.jpg)






![Пожалуй, главное заблуждение об электричестве [Veritasium]](https://imager.clipsaver.ru/6Hv2GLtnf2c/max.jpg)



![Эффект Джанибекова [Veritasium]](https://imager.clipsaver.ru/N9HlQ-XVnFk/max.jpg)
![Лампа накаливания — возможно, лучшее изобретение [Veritasium]](https://imager.clipsaver.ru/JstcTHp-IKM/max.jpg)