Темная материя робототехники: почему машинам трудно смириться с «физическим здравым смыслом»
Автор: Foundation Models For Robotics
Загружено: 2026-01-30
Просмотров: 34
Описание:
#Робототехника #ИскусственныйИнтеллект #ФизическийЗдравыйСмысл #УниверсальныйИИ #МашинноеОбучение #ВоплощенныйИИ #БудущееТехнологий
Почему малыш может ориентироваться в захламленной комнате, в то время как самые продвинутые роботы в мире часто не справляются с простыми задачами? В этом видео мы погрузимся в «темную материю» робототехники: **физический здравый смысл**.
*Что такое физический здравый смысл?*
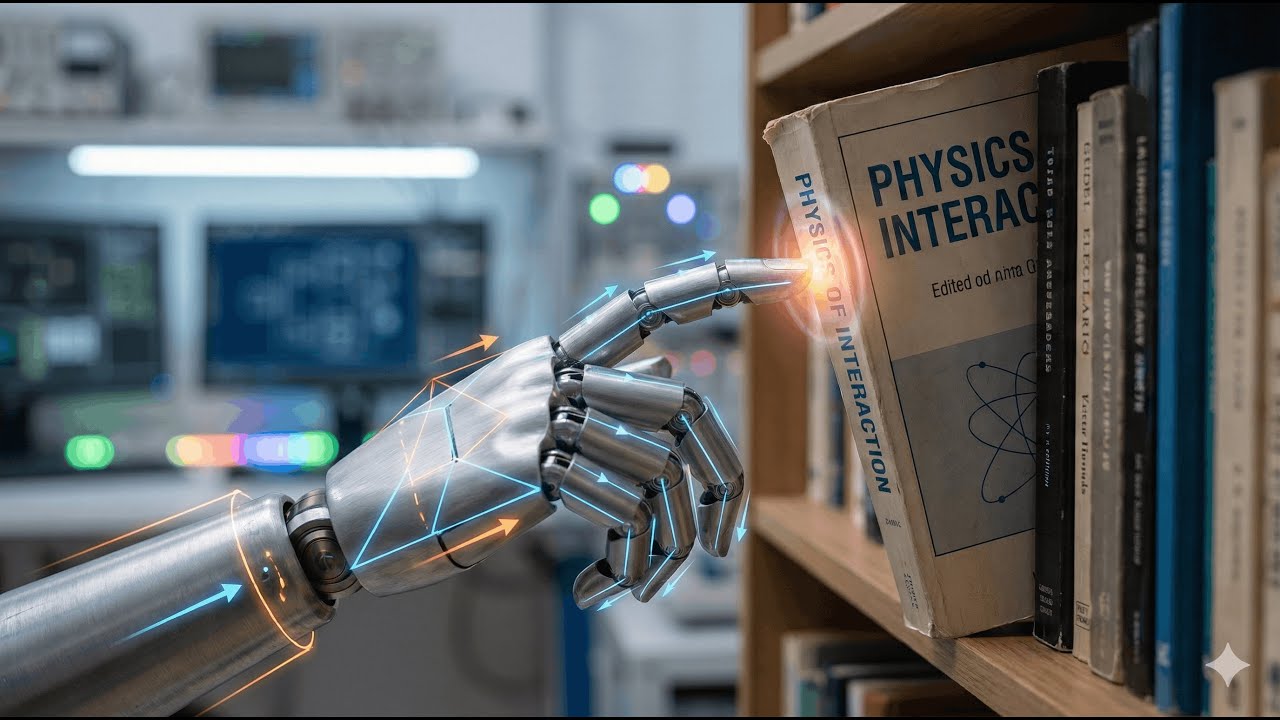
Физический здравый смысл — это *реактивный, замкнутый интеллект**, который мы используем для ориентации в мире. Это интуитивное понимание сил, трения и неопределенности — «неявное знание», которое позволяет нам подтолкнуть коробку, чтобы освободить место для пальцев, или поймать скользящий предмет, не задумываясь. Хотя для людей это кажется второй натурой, оказалось **невозможным запрограммировать* это в машины.
*Пробел в данных Интернета*
Большие языковые модели (БЯМ) обладают *семантическим здравым смыслом* — они понимают закономерности в словах и фактах. Однако им не хватает физического здравого смысла, поскольку данные Интернета не содержат **проприоцепции, вмешательства и последствий**. Вы не научитесь водить машину, просто прочитав инструкцию; вам нужен реальный опыт сенсомоторной петли.
*Преодоление парадокса*
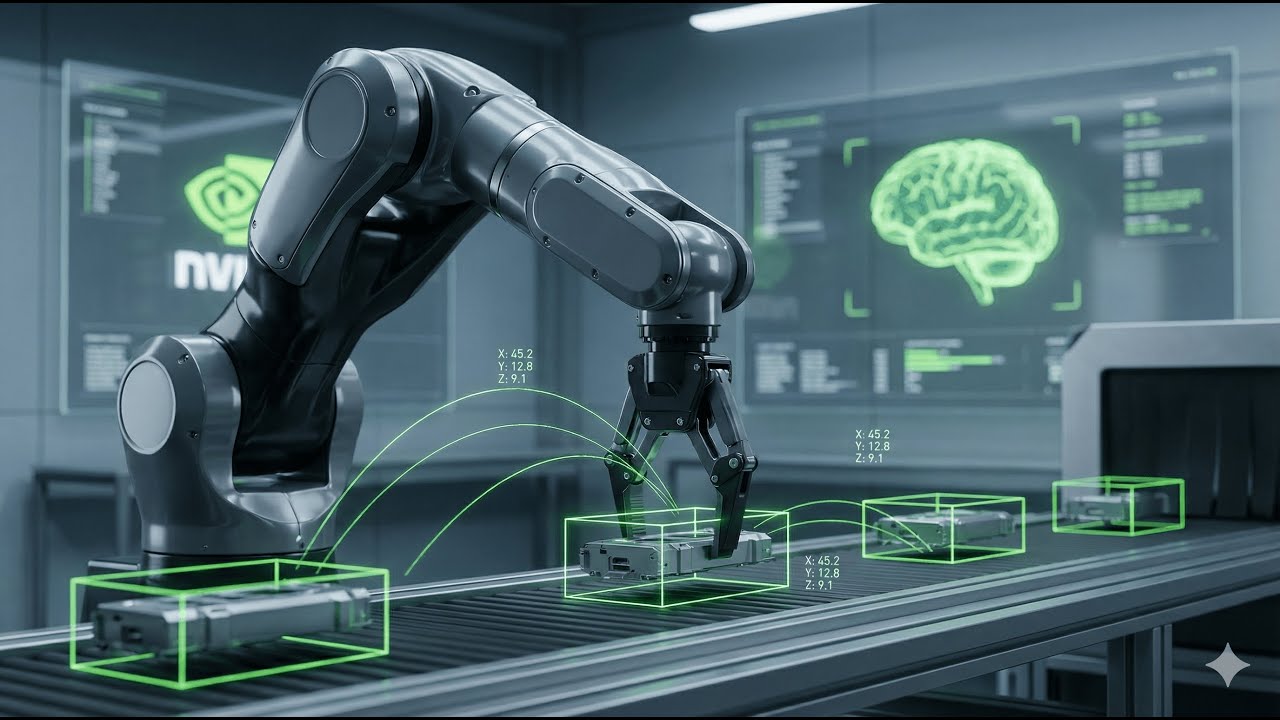
На протяжении десятилетий *парадокс Моравека* подчеркивал, что высокоуровневое рассуждение легко дается компьютерам, но низкоуровневые сенсомоторные навыки невероятно сложны. В Generalist AI мы преодолеваем этот пробел, используя крупномасштабные данные о физическом взаимодействии, которые **сохраняют сенсомоторную петлю**. Используя эргономичные портативные устройства, мы фиксируем человеческие рефлексы и **мышление Системы 1 (быстрое, реактивное)**, а не скованные, неестественные движения, наблюдаемые при традиционном дистанционном управлении.
*Основные моменты этого видео:*
*Сенсомоторная петля:* Почему для физического интеллекта актёрская игра важнее чтения.
*Эмергентное поведение:* Узнайте, как роботы учатся «двойно толкать» объекты или восстанавливаться после падений «бесплатно» без явного программирования.
*Фундаментальные модели для физического мира:* Как масштабирование физических данных приводит к созданию роботов, способных адаптироваться, восстанавливаться и оставаться устойчивыми в условиях неопределенности.
*Сборка за один раз:* Рассмотрим, как здравый смысл в физике позволяет осуществлять высокоуровневое мышление, например, создавать сложные конструкции из LEGO на основе одной демонстрации.
Здравый смысл в физике — это переломный момент, когда роботы становятся **широко полезными в больших масштабах**. Мы переходим от «запрограммированного совершенства» к «выученной интуиции», создавая машины, которые не просто следуют траекториям, но и фактически **реагируют на законы физики в реальном времени**.
*Об универсальном ИИ:*
Мы создаём универсальные интеллектуальные машины, способные преобразовывать всё, что взаимодействует с физическим миром.
--
*Теги:*
Робототехника, Искусственный интеллект, Физический здравый смысл, Универсальный ИИ, Машинное обучение, Сенсомоторная петля, Парадокс Моравека, Неявные знания, Обучение роботов, Взаимодействие с замкнутым контуром, Воплощённый ИИ, Человекоподобные роботы, Мышление системы 1, Энди Цзэн, Нейронные сети, Законы масштабирования в робототехнике, Физический ИИ, Роботизированные рефлексы, Сбор данных, Исследования в области ИИ
Повторяем попытку...
Доступные форматы для скачивания:
Скачать видео
-
Информация по загрузке: