High Performance, Ultra-Low Latency, Silent Actuators - Iris Dynamics at Automate 2022
Автор: Iris Dynamics Ltd.
Загружено: 2022-08-09
Просмотров: 2569
Описание:
High performance, ultra-low latency, and silent, ideal for human-machine interaction - The Orca Motor, Displayed at A3 2022
⇩
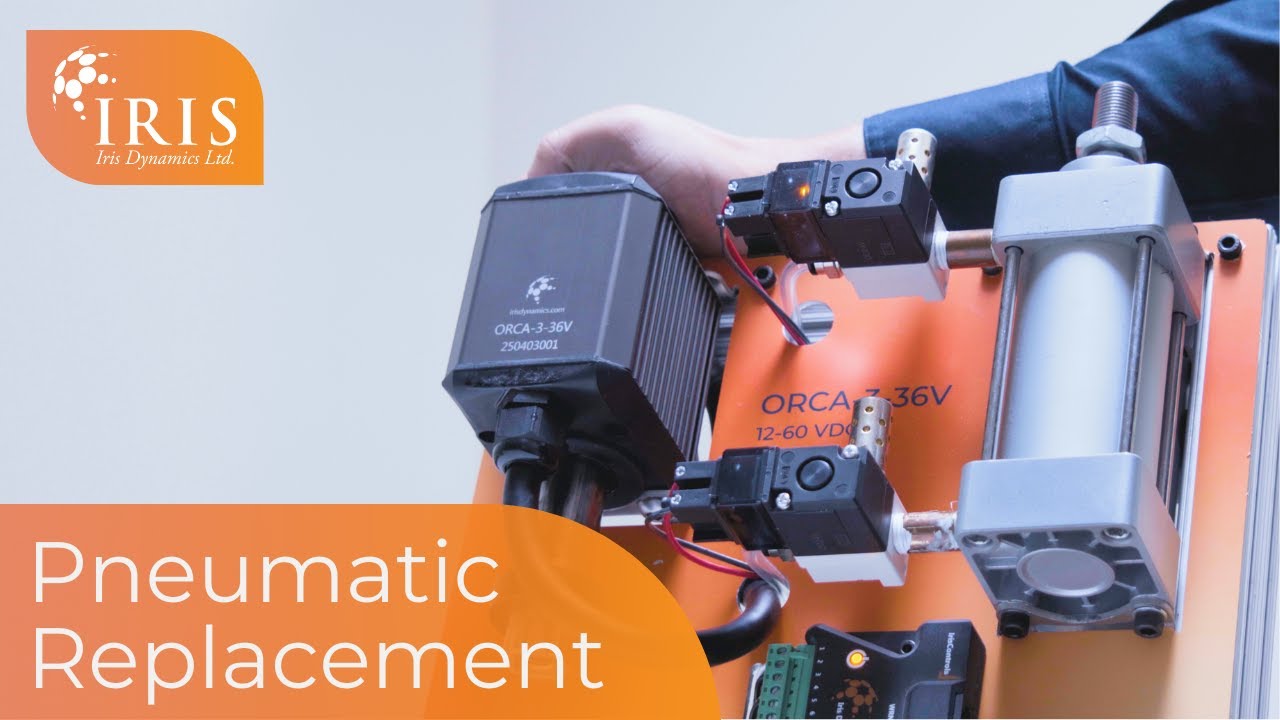
Our motor’s all-in-one approach means every motor includes efficient integrated four phase drivers, power delivery, logic, and (force/position/speed) sensing.
-------------------
Subscribe🔔! Follow us on LinkedIn, or join our mailing list by sending us a message on our website to keep up to date.
Contact Us Today! - https://irisdynamics.com/contact/?utm...
View Website - https://irisdynamics.com/?utm_content...
Follow us on LinkedIn - / iris-dynamics-ltd
Find Technical Specifications - https://irisdynamics.com/downloads/?u...
About Automate 2022 - https://www.automateshow.com/automate...
-------------------
Iris Dynamics Ltd.
In June of 2022 Iris Dynamics exhibited at Automate 2022 Detroit, the largest solutions based automation show in North America.
Demoed at the show were Iris Dynamics’s new line of Orca Linear Motors feature high performance, ultra-low latency, low TCO, and silent operation.
These motors are inherently force controlled with fully integrated drive and logic controllers making them ideal for applications with human-machine interaction.
Our motor’s all-in-one approach means every motor includes efficient integrated four phase drivers, power delivery, logic, and (force/position/speed) sensing.
Follow us on YouTube, Linked, or join our mailing list by sending us a message on our website to keep up to date.
-
CAPTIONS:
Hi I'm Patrick with Iris Dynamics. Here are some of the demos that we exhibited at Automate 2022 this year.
In this clip we can see two actuators sharing forced data with each other to create a perceived mechanical advantage. It's configured so that one motor is using a force sensing input while the other scales that data in software and applies it, in this case, to lifting the bowling ball. Conversely, the weight of the bowling ball can be felt through the other actuator as well. In this case we have two motors mirroring and inverting their forces. It's important to note this is not being done with position control but rather with force control.
In this example we're throwing and catching a bowling ball. We're not doing this based on timing or kinematics-based motion profiles. The catching action is triggered entirely from the motor sensing the force of the impact at the moment the ball touches the actuator arm. In this example we have a motor operating in a column of water. Our motors are all IP67 rated, meaning they're suitable for use in harsher environments. Another thing to mention in this example is the motor is not following an external communications command to move up and down the shaft, rather it's following a preset motion profile that was burned into the motor itself using our existing tools.
Thank you very much for your time. If you'd like to learn more please feel free to contact us at irisdynamics.com
Повторяем попытку...

Доступные форматы для скачивания:
Скачать видео
-
Информация по загрузке: