Experimental Validation of Bearing-Only Super-Twisting Control for Multi-Quadrotor Formations
Автор: Julio Rodriguez
Загружено: 2025-09-10
Просмотров: 100
Описание:
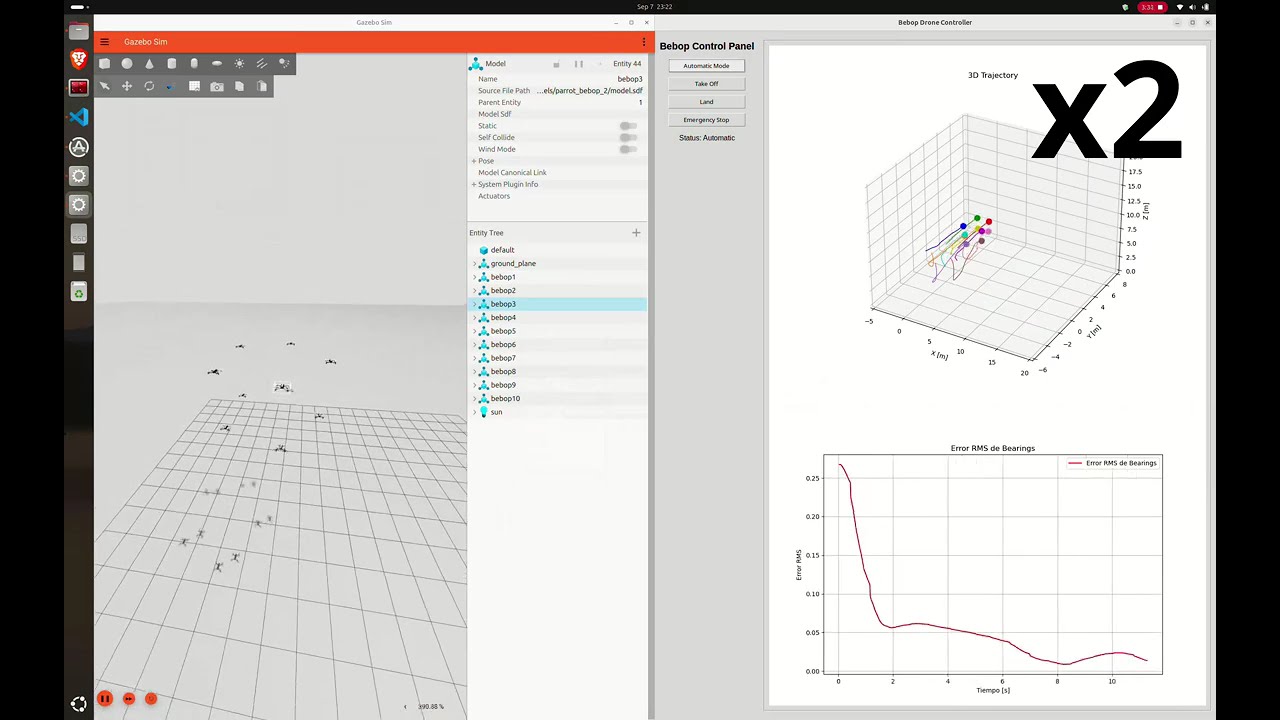
This video presents the experimental results and performance evaluation for the research entitled "Bearing-Only Super-Twisting Control for Multi-Quadrotor Formations."
This work addresses the bearing-only formation tracking control problem for a group of Quad-Rotors. We propose a novel sliding mode control strategy based on the Super-Twisting Algorithm (STA), enabling double-integrator agents to maintain a desired formation while tracking leaders with unknown, time-varying trajectories. The approach relies solely on bearing measurements and is designed to be robust against external disturbances.
Authors & Affiliations:
Julio César Rodríguez – Department of Electrical Engineering, CINVESTAV Guadalajara, Jalisco, México.
Email: [email protected]
Frida G. López Ruiz – Department of Electrical Engineering, CINVESTAV Guadalajara, Jalisco, México.
Email: [email protected]
Héctor M. Becerra – Department of Computer Science, Centro de Investigación en Matemáticas (CIMAT), Guanajuato, México.
Email: [email protected]
Javier Ruiz León – Department of Electrical Engineering, CINVESTAV Guadalajara, Jalisco, México.
Email: [email protected]
#Robotics #DroneFormation #ControlTheory #SuperTwisting #SlidingModeControl #GazeboSim #BearingOnly #Quadrotor #ROS
Повторяем попытку...
Доступные форматы для скачивания:
Скачать видео
-
Информация по загрузке:
![Почему работает теория шести рукопожатий? [Veritasium]](https://image.4k-video.ru/id-video/ggI1xKzoANs)


















