De-leafing and Harvesting Robot for Tomato
Автор: 王新
Загружено: 2024-05-01
Просмотров: 238
Описание:
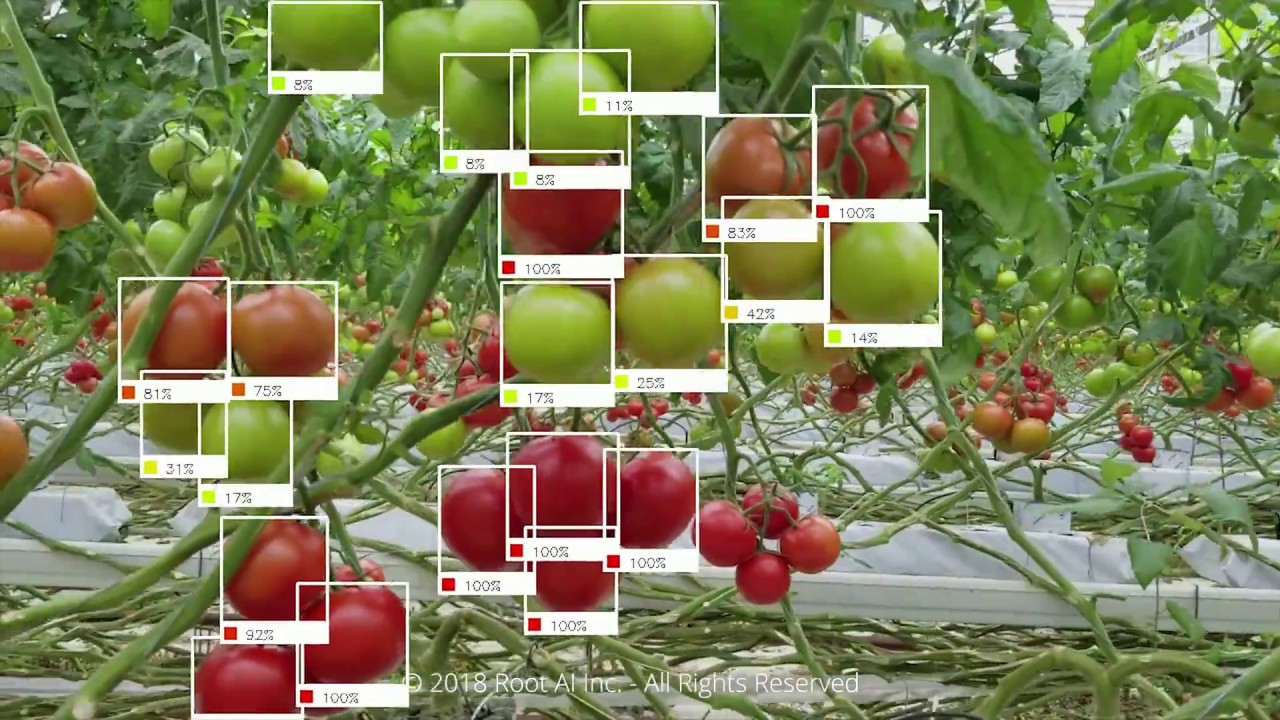
On 8th February 2024, we introduced our Tomato De-leafing and Harvesting Robot at the closing session of the FlexCRAFT project. This demonstration highlighted the integration of active vision algorithms with Next Best View (NBV) selection and Multi-view Object Tracking (MOT) data association, enabling rapid detection and precise localization of petioles and peduncles, even in heavily occluded conditions.
Special thanks to Gert Kootstra and Eldert J. van Henten for their supervision, as well as to Thomas Versmissen, Akshay K. Burusa, and David Rapado-Rincon from Wageningen University for their significant contributions to this demonstration.
We are currently revising the paper on the work mentioned above and look forward to meeting with everyone soon.
Повторяем попытку...

Доступные форматы для скачивания:
Скачать видео
-
Информация по загрузке: