Demo motion primitives from trajectory controller with Kuka
Автор: b»robotized
Загружено: 2025-09-03
Просмотров: 77
Описание:
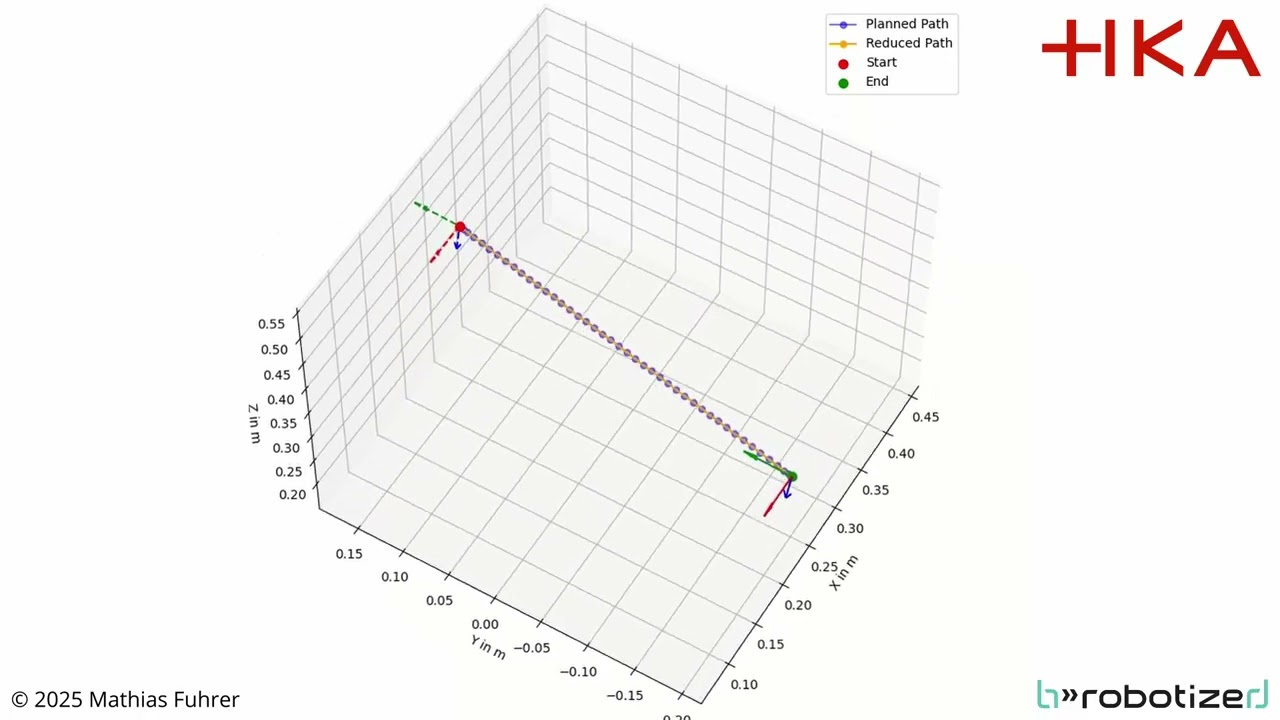
🚀 Motion Primitives in ROS 2 – powered by Mathias Fuhrer's Master’s Thesis!
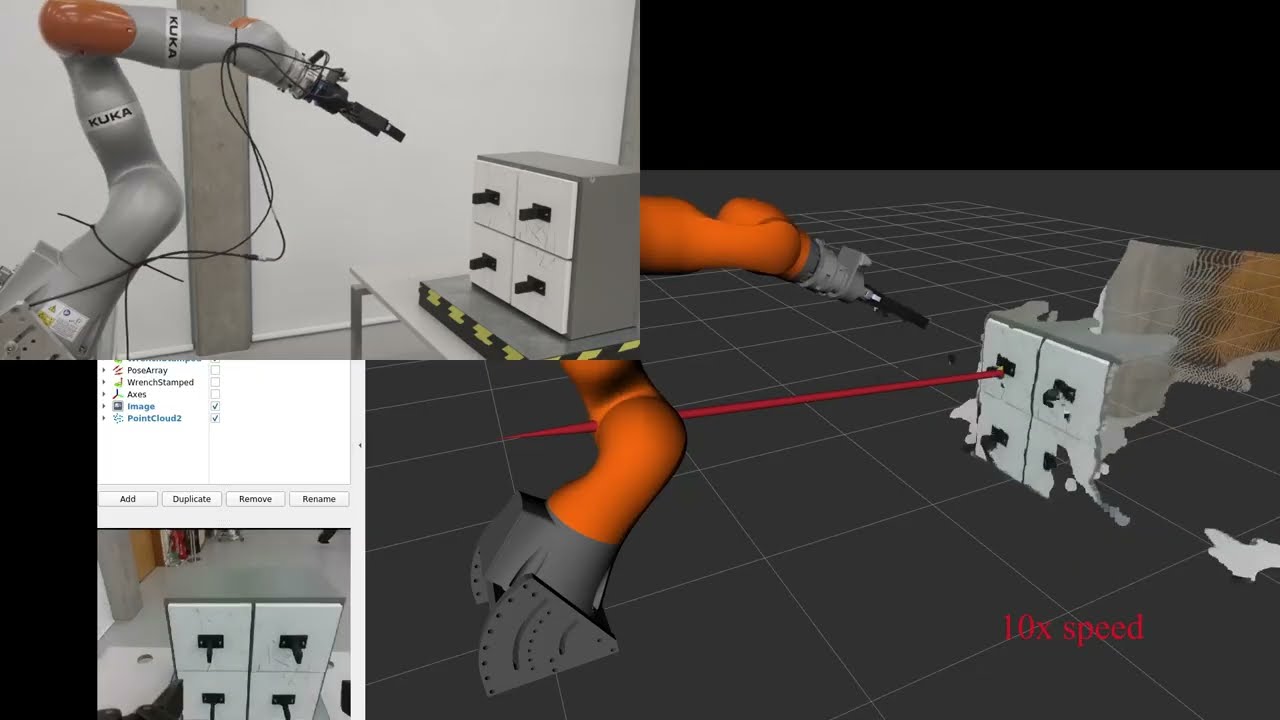
A few weeks ago, we introduced a ros2_control controller and hardware interfaces for KUKA and UR robots that enable executing motion primitives like PTP, LIN, and CIRC directly on the robot.
Now, Mathias Fuhrer has submitted another PR for a new controller that approximates joint trajectories using PTP or LIN motion primitives. This allows you to:
Plan collision-free paths with MoveIt
Execute them using industrial motion primitives
✅ PRs submitted to🔗 ros2_controllers (https://github.com/ros-controls/ros2_...)
#ros2 #ros2control #Robotics #MotionPrimitives #KUKA #opensource
Повторяем попытку...
Доступные форматы для скачивания:
Скачать видео
-
Информация по загрузке: