Скачать
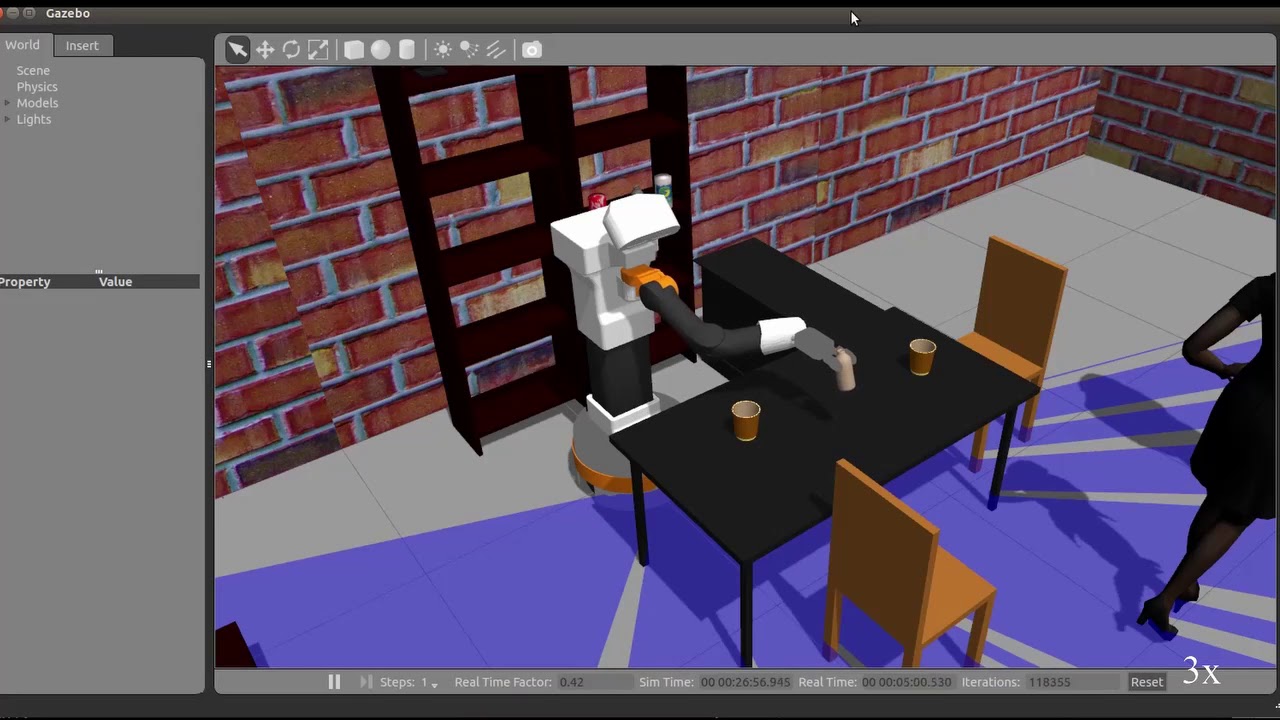
Pouring demonstration Simulation of TIAGo robot in Gazebo and ROS
Автор: Joshua Owoyemi
Загружено: 2018-06-27
Просмотров: 612
Описание: In this project, we demonstrate pouring manipulation with the TIAGo robot in a domestic environment using simulation in Gazebo and Rvis with the Robot Operating System (ROS). The robot is able to recognize bottles and pour liquids into a cup without spilling.
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Доступные форматы для скачивания:
Скачать видео
-
Информация по загрузке:



















