Скачать
Simultaneous Localization and Mapping (SLAM): EKF SLAM
Автор: Gustaf Hendeby
Загружено: 2020-05-10
Просмотров: 3916
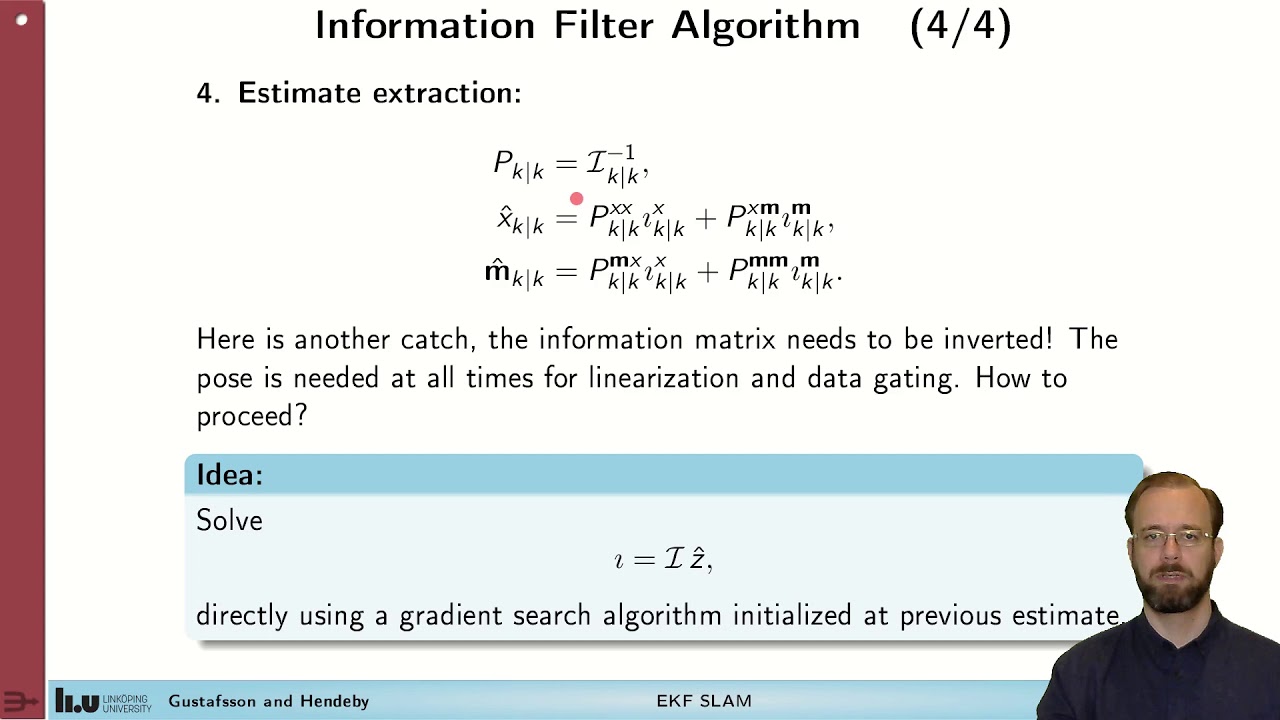
Описание: This video is part of the lecture series for the course Sensor Fusion. It describes how to solve the simultaneous localization and mapping (SLAM) problem using an extended Kalman filter (EKF) in both on the standard covariance form, and the information form.
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Доступные форматы для скачивания:
Скачать видео
-
Информация по загрузке:












![Фильтр Калмана [Control Bootcamp]](https://image.4k-video.ru/id-video/s_9InuQAx-g)






