Скачать
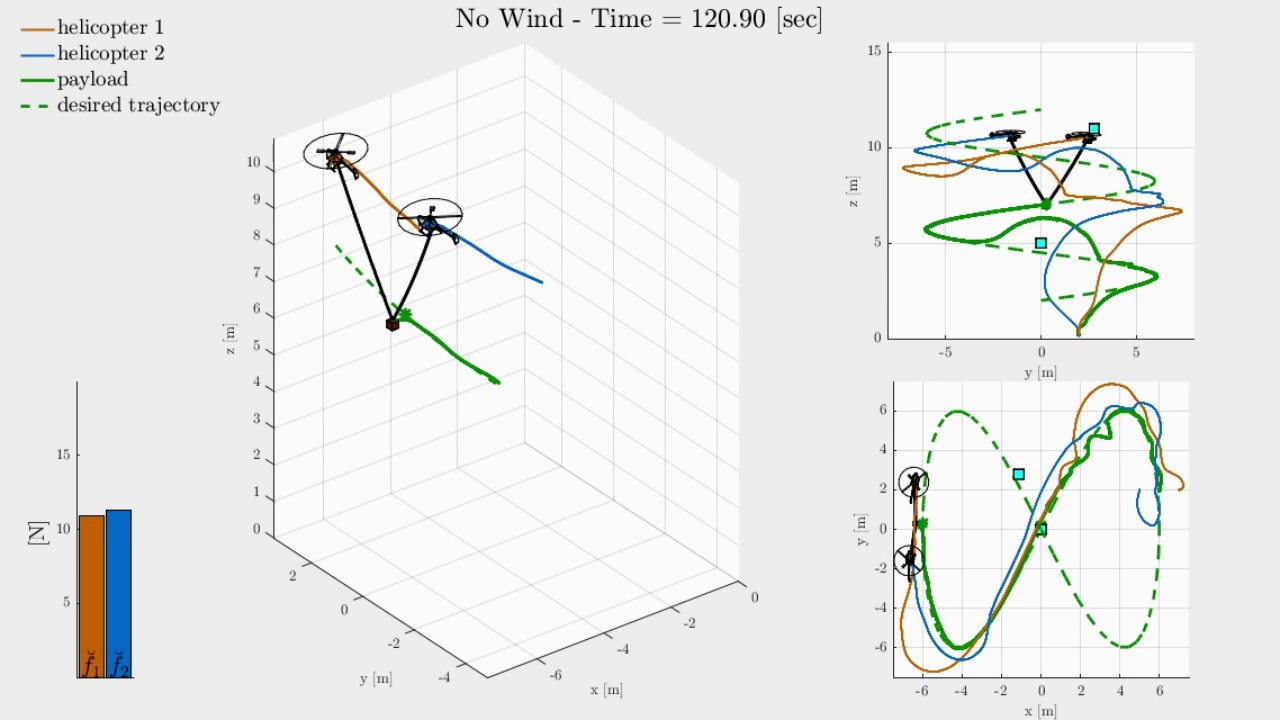
Cooperative payload transport with UAVs: Simulation environment 1
Автор: Instituto de Automática - INAUT
Загружено: 2017-12-04
Просмотров: 349
Описание: Cooperative transport of a payload considering obstacle avoidance and wind effects by using a controller based on Null-Space theory. The transport is carried out following an eight-shape upward trajectory. Two obstacles are considered, whereof the first one is static and the second one is dynamic.
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Доступные форматы для скачивания:
Скачать видео
-
Информация по загрузке: