Re-Deployment Algorithms for Multiple Service Robots to Optimize Task Response
Автор: ICRA 2018
Загружено: 2018-05-16
Просмотров: 189
Описание:
ICRA 2018 Spotlight Video
Interactive Session Tue PM Pod S.1
Authors: Sadeghi, Armin; Smith, Stephen L.
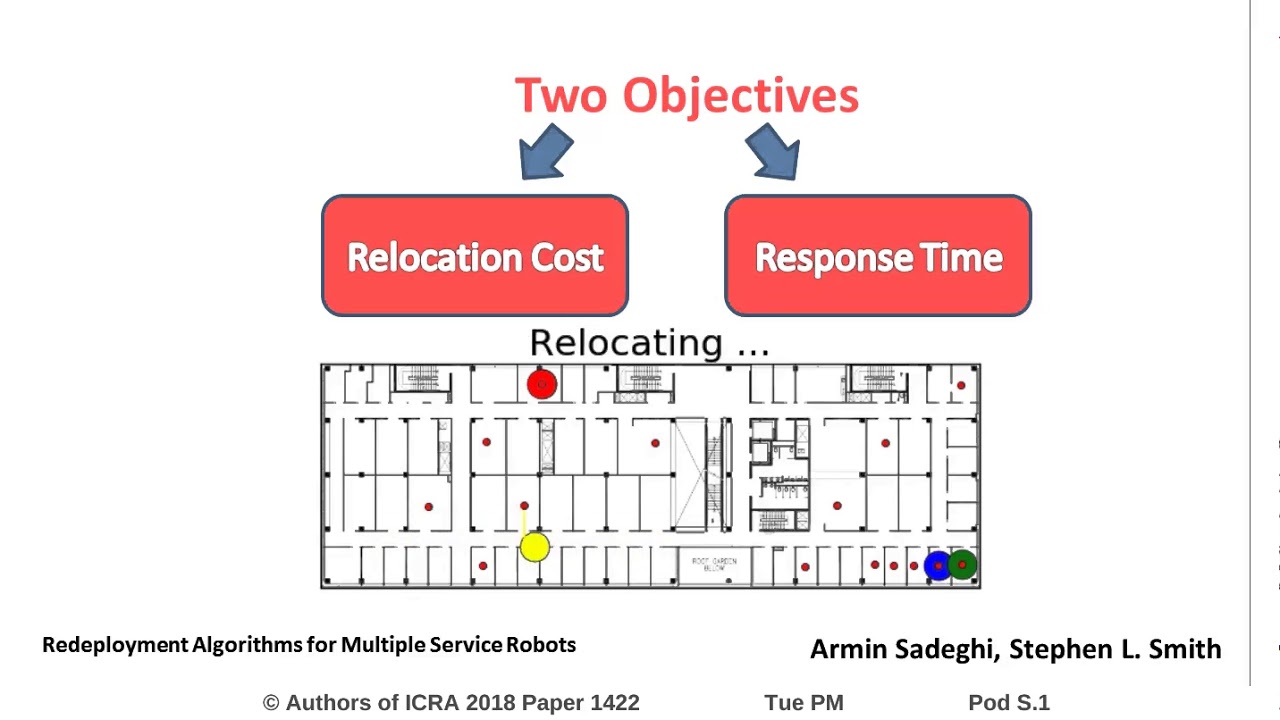
Title: Re-Deployment Algorithms for Multiple Service Robots to Optimize Task Response
Abstract:
This paper focuses on the problem of deploying a set of autonomous robots to efficiently service tasks that arrive sequentially in an environment over time. Each task is serviced when the robot visits the corresponding task location. Robots can then redeploy while waiting for the next task to arrive. The objective is to redeploy the robots taking into account the next N task arrivals. We seek to minimize a linear combination of the expected cost to service tasks and the redeployment cost between task arrivals. In the single robot case, we propose a one-stage greedy algorithm and prove its optimality. For multiple robots, the problem is NP-hard, and we propose two constant-factor approximation algorithm, one for the problem with a horizon of two task arrivals and the other for the infinite horizon when redeployment cost is weighted more heavily than service cost. Finally, we present extensive benchmarking results to characterize both solution quality and runtime.
Повторяем попытку...
Доступные форматы для скачивания:
Скачать видео
-
Информация по загрузке:














![ПОЛНЫЙ ГАЙД на n8n. ИИ агенты и автоматизации (5+ часовой курс) [Без кода]](https://imager.clipsaver.ru/tUufFo-JTZQ/max.jpg)



